
ザ ゲイツ コーポレイションにより出願された特許
51 - 60 / 103
ハイブリッドヤーンにより補強された流体転送ホース
フレキシブルホース11はチューブ12、編物14、およびカバー16を有する。編物14はコパラ系アラミド繊維である第1のヤーンとメタ系アラミド繊維である第2のヤーンとを有するハイブリッドヤーンを有する。ホース11は著しく改善した破裂圧および/または改善した耐撃力疲労性を示す。  (もっと読む)
(もっと読む)
車両駆動制御装置
【課題】可撓性連動動力伝達装置のメイン組立ラインにおけるステップ数および棚卸部品を低減する。
【解決手段】カムシャフトスプロケット50を離接可能に駆動装置フレームに取り付ける。クランクシャフト駆動ホイールを離接可能に駆動装置フレームに取り付ける。エンジン補機を駆動装置フレームに取り付ける。補機駆動ホイールをエンジン補機のシャフトに取り付ける。カムシャフトスプロケット50とクランクシャフトスプロケット、クランクシャフト駆動ホイールと補機駆動ホイールのそれぞれに可撓性連動媒体を掛けまわす。
(もっと読む)
テンショナ
歯付き部を有するベースと、ベースに回動自在に係合されたピボットアームと、ピボットアームに枢着されたプーリと、ベースとピボットアームの間に、ピボットアームを第1方向に付勢するために配置されたスプリングと、ピボットアームに設けられ、ベースに係合された機構とを備え、この機構が回転ギア部材と、回転ギア部材とピボットアームの間に係合された第2スプリングとを備え、第2スプリングがピボットアームを第1方向に付勢し、ギア部材が非歯付き部を有し、非歯付き部が歯付き部に係合するときに、それが第1方向からの反転方向へのピボットアームの大きな回転を防止するテンショナ。 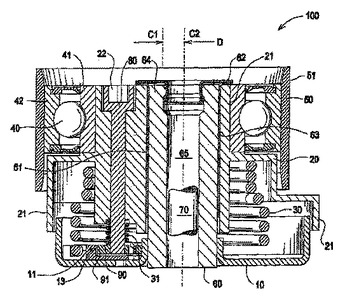 (もっと読む)
(もっと読む)
ツースピードトランスミッション及びベルトドライブシステム

【課題】2速変速比及び出力プーリ若しくは補機プーリ比の組合せにより、エンジンスピードに関して補機のスピードを制御するベルトドライブシステムの提供。
【解決手段】ツースピードトランスミッション100は、入力キャリア20に接続された入力プーリ10、サンギア18、及びリングギア17を備えるプラネタリギアトレーンを備える。サンギア18は電磁ブレーキ部材190と係合される。リングギアは出力プーリ30と係合される。ワンウェイクラッチ22は入力キャリアと出力シャフト31との間に設けられる。ブレーキ部材190はエンジンアイドル時に係合され、アイドル以上のエンジンスピードで解放される。ブレーキ部材が係合されるときサンギアは回転せず、それにより入力プーリよりも速いスピードでリングギア及び出力プーリを駆動する。
(もっと読む)
テンショナ
ベースと、ベースに回動自在に連結されたピボットアームと、ピボットアームに枢着されたプーリと、第1動作レンジに渡りピボットアームにバネ力を与え、ベースとピボットアームの間に配置される第1バイアス部材と、ベースとピボットアームの間に配置される第2バイアス部材とを備え、第2バイアス部材が、所定のピボットアーム位置においてバネ力をピボットアームに与え、所定のピボットアーム位置が第1動作レンジ内にあり、所定のピボットアーム位置を越えると第2バイアス部材が第1バイアス部材のバネ力を補足するテンショナ。 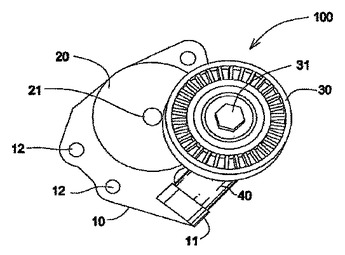 (もっと読む)
(もっと読む)
歯付き動力伝達ベルト
歯付きベルトは、本体(12)と、本体で形成される少なくとも1つの歯(14)と、少なくとも1つの歯の外周面に沿って配置され、0.5mm〜約0.8mmの範囲の圧縮厚さを有するジャケット(16)と、本体に埋設され直径を有する少なくとも1本のコード(18)とを含む。少なくとも1本のコードと前記ジャケットは、1.8未満の前記ジャケット厚さに対する前記コード直径の比を有し、前記コード直径及び前記ジャケット厚さは、約1.2mm以下の光学ベルトPLDを描く。 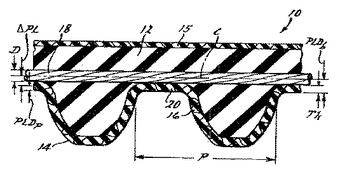 (もっと読む)
(もっと読む)
可変容量スライディングベーンポンプ
ポンプ本体と、前記ポンプ本体に設けられた吸入および排出ポートと、前記ポンプ本体に回転自在に搭載された駆動シャフトと、前記駆動シャフトによって駆動され、前記駆動シャフトと同軸的に配置されたロータと、前記ロータに滑動自在に配置され、放射状に延出する複数のベーンと、前記ポンプ本体に配置されたピボットと、前記ポンプ本体内において前記ピボットに回動自在に配置され、前記ロータ軸から偏心した中心軸を有するスライド部と、前記ロータ、ベーン、スライド部によって画定され、前記吸入および排出ポートに順次連通される複数の流体チャンバと、前記スライド部を1つの方向に押圧するために前記スライド部に作用するバネと、各々流体圧力を受けるのに適するとともに前記ポンプ本体と前記スライド部の外周面の間に各々配置される第1チャンバおよび第2チャンバとを備え、前記第1チャンバはポンプ出口排出圧力と流体的に連絡され、前記第2チャンバを選択的に加圧、減圧するように作動可能なバルブを更に備える可変容量スライディングベーンポンプ。 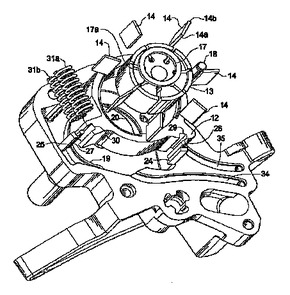 (もっと読む)
(もっと読む)
動力伝達ベルト
動力伝達ベルト(20)は、弾性部材を含むとともに長手方向に沿った抗張部材(10)を有する本体(11)を含む。本体は、所定の輪郭形状を有するプーリ係合領域(12)を有しており、プーリ係合領域は、繊維による不織布部材(15)であって、その不織布部材の繊維がアクリル繊維を含むことにより特徴付けられるものを含む。アクリル繊維は、好ましくは約1.5dpfよりも細い超極細糸であり、13.5ミクロンあるいはそれよりも小さい平均直径と約1mmから約10mmまでの平均長さを有する。不織布部材は、プーリ係合領域において弾性体部材と混合されていても良い。不織布部材の繊維の約75重量パーセントまでは、他の合成繊維、天然繊維、あるいはセルロース繊維などの非アクリル繊維を含んでも良い。 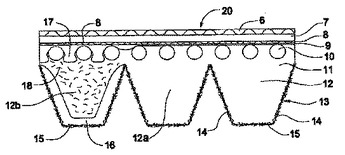 (もっと読む)
(もっと読む)
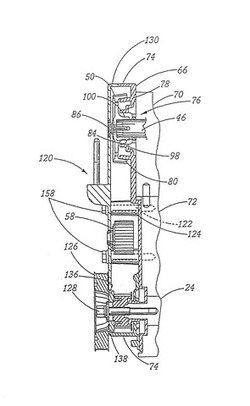
可変比率ベルト伝動システム
第1無端部材(16)により第1従動部材(13、15、17、18、19)に回転自在に連結される原動部材(CRK)と、原動部材と第2従動部材の間で回転自在に連結される第2無端部材(12)と、第1無端部材から第2無端部材へとトルクを選択的に伝達するために第1無端部材と第2無端部材との間に介装される第1クラッチ(57、SO)と、第2無端部材を原動部材から選択的に切り離すために第2無端部材と原動部材との間に介装される第2クラッチ(42、82)とを備えるベルト伝動システム。 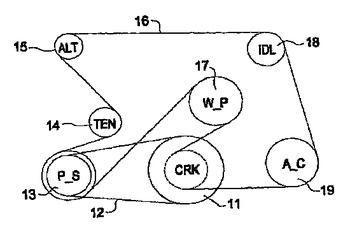 (もっと読む)
(もっと読む)
振動吸収アイソレータ
振動吸収アイソレータは、原動部材と、従動部材と、原動部材に固定して取り付けられ、従動部材と滑り係合して従動部材の原動部材に対する所定の回転運動を可能にする保持部材と、原動部材と従動部材の間に配置され、原動部材と従動部材の間において駆動方向に圧縮されるエネルギー吸収部材とを備え、エネルギー吸収部材の圧縮からの解放により従動部材を原動部材から一時的に切り離すことができ、それにより所定の角度範囲で原動部材から従動部材へと実質的にトルクが伝達されない。 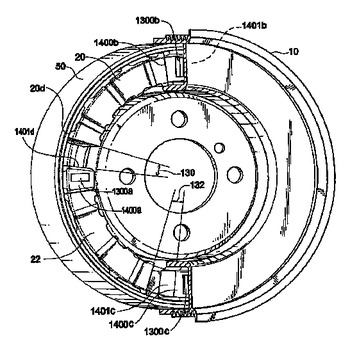 (もっと読む)
(もっと読む)
51 - 60 / 103
[ Back to top ]