
国立大学法人東京海洋大学により出願された特許
1 - 10 / 83
高周波インバータ
Notice: Undefined index: from_cache in /mnt/www/gzt_applicant_list.php on line 189
釣り餌
【課題】エビ類又はオキアミに内在するプロテアーゼ及びチロシナーゼの活性を阻害し、筋肉組織を結合させ続けることにより、釣り針からの脱落や頭部の落下を防ぐと共に、色調の黒変防止効果が高く、魚の食い付きを低下させることもない釣り餌を提供すること。
【解決手段】エビ類又はオキアミに海洋糸状菌培養上清及び卵白の水溶液を含浸して成る。水溶液にグルタミンペプチドを加えるとよい。
(もっと読む)
水中ロボット

【課題】無線による通信を実現することにより、単機能モジュールを独立ユニットに構成し、耐圧・耐水に優れて、各モジュールの交換が容易な水中ロボットを提供する。
【解決手段】少なくとも作業装置2bと制御装置7bを含む単機能モジュールを耐圧防水ケース2a,7aに格納した複数の独立ユニット2,7と、独立ユニット2,7を着脱可能に取り付けることができるシャシー5,6と、耐圧防水ケース2a,7aに穴を開けることなく、その外側に接触固定させる非導電性の伝達媒体10と、を有し、独立ユニット2,7は、通信手段2c,7cと、電池2d,7dを内蔵し、制御装置7bは、制御装置の独立ユニットの通信手段7cと、他の単機能モジュールを格納した独立ユニットの通信手段2cとを介して通信をし、他の単機能モジュールを制御して水中ロボットとしての全体の作動を制御する。
(もっと読む)
魚類のタンパク質節約を目的とした飼料
【課題】魚類がタンパク質節約のできる飼料の提供。
【解決手段】魚油、コーン油及び下記の化学構造式(該式中、R1はヒドロキシ基、R2はヒドロキシ基、メトキシ基あるいはアルコキシ基、R3はトリテルペンを示す)で表される化合物またはその塩類を添加する。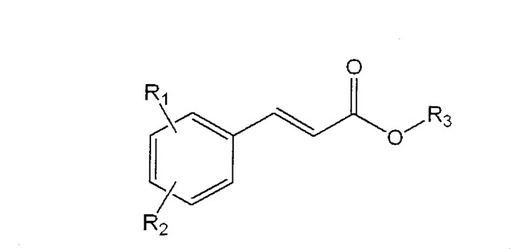 (もっと読む)
(もっと読む)
挽肉充填乾燥物の製造方法とその方法に使用する減圧乾燥装置
【課題】燻煙処理を施した未乾燥サラミソーセージ、特に太物の未乾燥サラミソーセージを、内部と表面近くとで乾燥ムラを生じさせることなく、速やかに乾燥させる。
【解決手段】未乾燥サラミソーセージを減圧下に置きながら通電し、含まれている水分の蒸発によって生ずる温度の低下を通電によって生ずるジュール熱で補って温度の低下による肉の収縮を阻止し、未乾燥サラミソーセージの内部から表面側への水蒸気の通りを良好にし、表面近くの肉の乾燥の進み過ぎによる収縮を阻止し、内部と表面近くとで乾燥ムラが生じさせることなく速やかに乾燥させる。
(もっと読む)
移動体運行情報システム
【課題】レイヤの重なりで表示された画面でレイヤの前後関係を変えることなく、下層にある任意のレイヤのオブジェクトを操作できる移動体の運行情報システムを提供する。
【解決手段】画面データを表示したレイヤを所定の順番で複数層重ねてコンピュータ画面に表示させる画面表示部4と、各レイヤのどの部分をオブジェクトとして管理するかを決定し、各オブジェクトごとに識別情報を与え、所定時間における各オブジェクトの位置情報を管理するオブジェクト制御と、カーソルが所定の座標にあるときにコマンドが発せされた場合に、前記座標に位置整合するオブジェクトが前記コマンドを実行するか否かを制御するオブジェクトのコマンド透過性制御と、レイヤの透明性を制御することによってレイヤ全体の表示の有無を制御する表示制御とを行うレイヤ制御部3と、オブジェクトが有する情報を格納する情報データベース5と、入力手段6と、中央処理部2と、を備えた。
(もっと読む)
新規有用深海細菌
【課題】ポリマー(高分子)を産生する新規な細菌、該細菌を使用してポリマーを製造する方法、及び該方法により製造されたポリマーを提供する。
【解決手段】(A)特定の塩基配列からなるDNA、又は、(B)上記塩基配列と99.5%以上の同一性を有するDNA、を含む16SrRNA遺伝子を有する、ポリマー産生能を有する、コクリア属に属する細菌、特に、コクリア属新種細菌4B株(Kocuria sp.4B株)又はその変異体、該細菌を培養してシスタチオニンを構成成分として含むポリマーを製造する方法、及び製造されたポリマー。
(もっと読む)
ヒラメラブドウイルス結合性アプタマー
【課題】ヒラメラブドウイルス(HIRRV)の感染を予防及び治療することのできる医薬及び方法、HIRRVを特定水域から除去する装置及び方法、並びにHIRRVを簡便かつ高感度に検出するための方法及びキットを提供する。
【解決手段】HIRRV及び/又は該ウイルスで発現するポリペプチドに結合し、宿主のHIRRV感染活性を抑制する活性を有するHIRRV結合性核酸アプタマー。また、前記HIRRV結合性核酸アプタマーを用いてHIRRV及び/又は該ウイルスで発現するポリペプチドを検出する方法。
(もっと読む)
直進型及び回転型ロボットの制御装置
【課題】高精度な位置決めが要求される工作機械等において、比較的単純な構造を保ちつつ、迅速かつ高精度な位置決めを実現する直進型及び回転型ロボットの制御装置を提供する。
【解決手段】H無限大制御理論に基づく制御系であって、制御器は数式的に以下の3つの部分に分かれる。1)モータの速度が定常誤差なく追従できるように設計された速度制御器。2)速度制御ループを含めたモータに対して設計されたH∞角度制御器。3)ゲイン可変のフィードフォーワード制御器。制御対象の伝達関数に積分要素が含まれた場合における適切な制御が可能となる。
(もっと読む)
畜肉または魚肉のメト化率測定方法および品質評価方法
【課題】メト化率の低い領域であっても、高感度、高精度かつ簡易に、メト化率を測定できる、畜肉または魚肉のメト化率測定方法の提供。
【解決手段】測定対象の畜肉または魚肉について、波長350〜450nmにおいて測定された吸光スペクトルの吸収ピークをとる波長x(nm)と、波長500〜760nmの間の所定の複数の波長における吸光度を測定して、所定の関係式に算入して得られた、メト化率y(%)との関係から、予め一次相関式を導出しておき、このとき、測定した肉に赤身肉と血合い肉とが混在したものと判定される測定値(xおよびy)がある場合には、その測定値を除いて、前記一次相関式を導出し、被検肉について、波長350〜450nmの吸光スペクトルを測定して、その中で吸収ピークをとる波長の値と、前記相関式とからメト化率を算出することを含む、畜肉または魚肉のメト化率測定方法。
(もっと読む)
1 - 10 / 83
[ Back to top ]