
ナヴコム テクノロジー インコーポレイテッドにより出願された特許
1 - 10 / 28
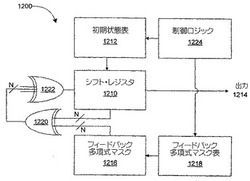
衛星ナビゲーション受信機用適応符号発生器
【課題】GNSS(衛星間干渉を軽減するために符号ダイバシティ・マルチ・アクセス方法を利用するGNSS)及び異なるGNSSにおける異なる衛星からのナビゲーション信号に対応する多くの異なる疑似ランダム符号を発生する回路を有することが多い。この回路のために、受信機に余分な複雑さやコストがかかることになく、GNSS受信機における疑似ランダム符号の発生を改良する。
【解決手段】可調節符号発生器は、スペクトル拡散符号信号の集合を発生するように構成することができる。各スペクトル拡散符号信号は、それぞれの周期に対応するそれぞれの長さを有する。スペクトル拡散符号信号の集合は、別個の第1及び第2長を有する第1及び第2スペクトル拡散符号信号を含む。
(もっと読む)
衛星航法デバイス

【課題】複雑化及びコスト上昇を生じずに柔軟なRF受信機を含む衛星航法デバイスを提供する。
【解決手段】
衛星航法デバイスは、複数の衛星からの少なくとも1つのスペクトル拡散信号を含む信号を受信する受信機を備え、該受信機は、複数チャネルを有し、各チャネルが、信号の少なくとも一部を中間周波数にダウン・コンバートすることによって、各衛星からのスペクトル拡散信号においてそれぞれの周波数帯域を受信するサブチャネル回路436を含み、該サブチャネル回路は、中央周波数が前記中間周波数に実質的に等しく、帯域幅が前記第1衛星の帯域幅よりも大きいバンドパス・フィルタ422を備えている。
(もっと読む)
ローカルRTKシステムと、地域、広域、またはグローバル搬送波位相測位システムを組み合わせて利用する方法
【課題】 リアルタイムの高精度測位およびナビゲーションをより現実的なものにすること。
【解決手段】 本発明は、ローカルRTKシステムと、地域、広域、またはグローバル差分搬送波位相測位システム(WADGPS)を組み合わせて利用する方法を含んでおり、別個に利用された際にRTKおよびWADGPSナビゲーション技術に付随する短所が回避される。本方法には、静止しているユーザー受信器の既知の位置を用いるか、あるいはユーザー受信器が移動中である場合、RTKシステムを用いてWADGPSシステムにおける浮動バイアス値を初期化することを含んでいる。その後で、ユーザーGPS受信器において取得された屈折補正された搬送波位相測定値が、対応する初期浮動バイアス値を含めることにより調整され、後続の処理において浮動バイアス値が周知の(分散が小さい)として扱われてWADGPSシステム内でユーザー受信器を測位する。
(もっと読む)
ローカルRTKシステムと、地域、広域、またはグローバル搬送波位相測位システムを組み合わせて利用する方法
【課題】浮動バイアス値を短時間で決定する。
【解決手段】ローカルRTKシステムと、地域、広域、またはグローバル差分搬送波位相測位システム(WADGPS)を組み合わせて利用する。静止しているユーザー受信器の既知の位置を用いるか、あるいはユーザー受信器が移動中である場合、RTKシステムを用いてWADGPSシステムにおける浮動バイアス値を初期化する。その後、ユーザーGPS受信器において取得された屈折補正された搬送波位相測定値が、対応する初期浮動バイアス値を含めることにより調整され、後続の処理において浮動バイアス値が周知として扱われて、WADGPSシステム内でユーザー受信器を測位する。
(もっと読む)
リアルタイムキネマティック(RTK)測位における距離依存性誤差の軽減
【課題】
全地球的航法衛星システム内の複数の衛星から受信される信号に基づいてコード測定値及び搬送波位相測定値の距離依存性大気誤差を軽減する。
【解決手段】
残差対流圏遅延及び複数の残差電離層遅延をカルマンフィルタ内の状態としてモデル化する(340)。カルマンフィルタの状態更新関数は少なくとも1つの基線距離依存因子を含み、ここで基線距離は基準受信機と移動受信機との間の距離である(340)。複数のアンビギュイティ値をカルマンフィルタ内の状態としてモデル化する。アンビギュイティ状態のためのカルマンフィルタの状態更新関数は動的ノイズ因子を含む(図3Bの360)。残差対流圏遅延(372)、複数の残差電離層遅延(374)及び/又は複数のアンビギュイティ値(376)に従って移動受信機の推定位置を更新する(370)。
(もっと読む)
部分探索搬送波位相整数アンビギュイティ決定
全地球航法衛星システムにおいて整数アンビギュイティ決定を実施する方法を開示する。衛星の特定されたセット内の衛星から受信される信号のうちの少なくとも幾つかの搬送波位相測定に関連付けられるアンビギュイティのセットを特定する(図4Aのブロック420)。整数アンビギュイティを推定し、整数アンビギュイティ値の最良候補セット及び次善候補セットを求める(ブロック430)。整数アンビギュイティ値の最良セットが識別試験を満たさないと判断する(ブロック440)と、最良候補セット及び次善候補セット内の整数アンビギュイティ値が所定の基準を満たさない各アンビギュイティをアンビギュイティのセットから除去し、アンビギュイティの低減されたセットを生成する(図4Bのブロック450)。その後、アンビギュイティの低減されたセット内の整数アンビギュイティを決定し(図4Cのブロック468)、決定された整数アンビギュイティに従って出力を生成する(図4Cのブロック470)。 (もっと読む)
衛星ナビゲーション受信機用適応符号発生器
可調節符号発生器を含む衛星ナビゲーション・デバイス110について記載する。可調節符号発生器は、スペクトル拡散符号信号の集合を発生するように構成することができる。各スペクトル拡散符号信号は、それぞれの周期に対応するそれぞれの長さを有する。スペクトル拡散符号信号の集合は、別個の第1及び第2長を有する第1及び第2スペクトル拡散符号信号を含む。 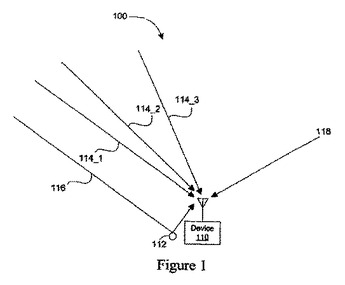 (もっと読む)
(もっと読む)
マルチバンド逆L字状アンテナ
アンテナ100は、第1アンテナ・エレメント及び第2アンテナ・エレメントを含む。第1アンテナ・エレメント及び第2アンテナ・エレメントは、第1周波数帯域及び第2周波数帯域における信号を送信及び受信するように構成されている。第1遅延線対612が第1アンテナ・エレメントに接続され、第2遅延線対が第2アンテナ・エレメントに接続されている。第1遅延線対612及び第2遅延線対における第1遅延線が、第1アンテナ・エレメント及び第2アンテナ・エレメントに接続されている電気信号310を移相させて、アンテナの第1インピーダンスが第1周波数帯域及び第2周波数帯域においてほぼ等しくなるように構成されている。第1遅延線対及び第2遅延線対における第2遅延線が、第1インピーダンスを第2インピーダンスに変換するように構成されている。 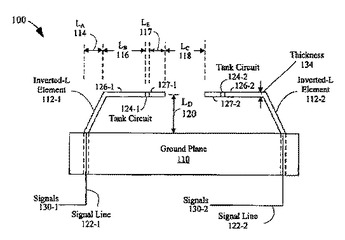 (もっと読む)
(もっと読む)
3つのGPS周波数を用いて整数値サイクル(whole−cycle)搬送波位相アンビギュイティを解消する方法
配置非依存であり、屈折が補正され、アンビギュイティが解消された、搬送波位相測定値を取得するための新たな3種周波数技法が記載されている。まず、少なくとも2つのワイドレーン搬送波位相測定値差異に対するアンビギュイティを、対応する周波数加重コード測定値を平均化することによって取得する(210)。そして、これらの2つのアンビギュイティが解消された測定値を結合して、屈折が補正された合成測定値を形成する(220)。結果としての合成測定値は、元の搬送波位相測定値におけるマルチパス・ノイズの増幅に起因して極めてノイズが多い。しかしながら、このノイズの多い屈折が補正された搬送波位相測定値を、別の、ノイズが最小であり、屈折が補正された搬送波位相合成測定値を用いて平滑化することができる。ノイズが最小であり、屈折が補正された合成測定値を、それらの整数値サイクルアンビギュイティを解消する前に初期搬送波位相測定値から構成する(230)。2つの屈折が補正された測定値の差異を平滑化する(240)ことによって、ノイズを低減することができ、低ノイズ測定値におけるバイアス(不正確なアンビギュイティに起因する)を推定して後に補正することができる。 (もっと読む)
地域的、広域、又は大域的キャリア位相差ナビゲーション(WADGPS)からローカル・リアル・タイム力学的(RTK)ナビゲーション・システムに移行するときに、位置情報の信頼性を高める方法
【課題】本発明は、ローカル測位システムと、ローカルRTKシステムと、地域、広域、又は大域差動搬送波位相測位システム(WADGPS)を組み合わせて利用する方法を含んでおり、ローカル測位システム、RTK及びWADGPSナビゲーション技術を別個に使用すると随伴する短所を回避する。本方法は、WADGPSからの情報に基づいて、前記対象の第1位置を判定し、ローカル測位/RTK測位システムからの位置情報に基づいて対象の第2位置を判定するステップを含む。その後、WADGPSによって判定した位置と、ローカル測位/RTK測位システムによって判定した位置とを比較する。WADGPS位置及びローカル測位/位置に既定の閾値を超える差がある場合、対象をナビゲートするためにWADGPS位置を用い、WADGPS位置及びローカル測位/RTK位置に既定の閾値未満の差がある場合、対象をナビゲートするためにローカル測位/RTK位置を用いる。 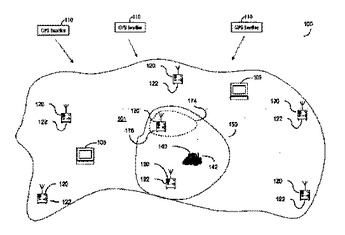 (もっと読む)
(もっと読む)
1 - 10 / 28
[ Back to top ]