
コグネックス・コーポレイションにより出願された特許
11 - 16 / 16
ビジョンセンサ、システムおよび方法
実施態様における単一チップビジョンセンサは1個のピクセルアレーと1以上の回路とを含む。1以上の回路は、1以上の特徴のモデルを利用して1以上の特徴に対するイメージをサーチするように構成されている。単一チップビジョンセンサにおける実施態様での方法は、少なくとも一部は感知された光に基づいてイメージを取得すること、および1以上の特徴のモデルを利用して1以上の特徴に対するイメージをサーチすることを含む。実施態様におけるシステムには、単一チップビジョンセンサとデバイスが含まれる。デバイスは、単一チップビジョンセンサから1以上の信号を受け取り、少なくとも一部は1以上の信号に基づいて動作を制御するように構成されてなる。 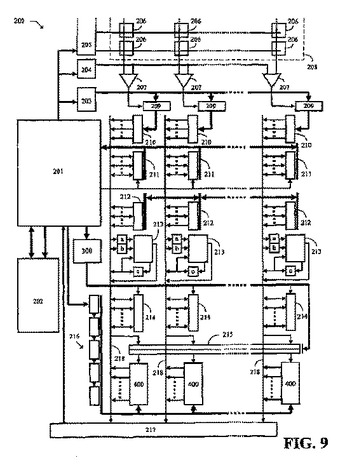 (もっと読む)
(もっと読む)
複数の画像フレームを使用してパターンを読取るシステム、及び方法
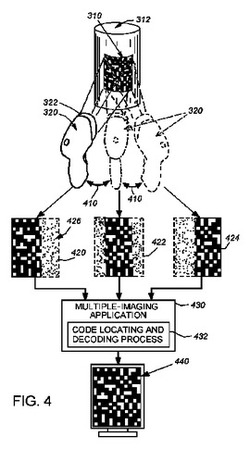
本発明は、記号の複数の画像フレームを使用し、対応するデータを含む記号を復号するシステム、及び方法を提供する。これらのフレームの少なくとも一部は、種々の撮像パラメタ(例えば、向き、レンズズーム、開口など)を有し、フレームと例示的マルチ撮像アプリケーション(430)の組み合わせにより、各フレームの最も読取りやすい部分を1つに結合することができる。さらに、一枚の「最良」画像を選択することがある従来のシステムとは違い、例示的システム方法によれば、この結合された画像を、元になった記号の完全な読取可能画像(310)にすることができる。システム、及び方法の一実施形態は、記号の複数の画像フレームを取得する撮像アセンブリを含み、画像フレームの一部は、他の画像フレームとは異なる個別の撮像パラメタを有する。撮像アセンブリに接続されたプロセッサは、前記記号の複数の取得画像フレームを処理し、前記複数の画像フレームのうちの少なくとも一部から所定のコードデータを復号し、前記複数の画像フレームのうちの少なくとも一部から得られた前記所定のコードデータを結合し、前記記号により表される前記データセットの復号可能バージョンを定義する。 (もっと読む)
ピクセルアレイ露光パターン制御を可能にする回路、及び方法

画像センサ回路を含む画像処理システム。画像センサ回路は、ある種のシャッター動作を使用して画像を得るように構成され、そのシャッター動作において、ピクセルアレイの露光パターンは、ピクセルアレイの少なくとも一部に蓄積された電荷に少なくとも一部基いて時間的に変化する露光情報に従ってセットされる。画像センサ回路は、ピクセルアレイ、及び1以上の回路を含む。1以上の回路は、ピクセルアレイから出力された1以上の信号に少なくとも一部基いて露光情報を更新するように構成され、その露光情報に基いてピクセルアレイの露光パターンを制御するように構成される。ピクセル回路は、フォトダイオードとセンスノードとの間に接続された第1のトランジスタと、露光制御信号ラインと、第1のトランジスタのゲートとの間に接続された第2のトランジスタとを含む。 (もっと読む)
物体の光電子工学的検知、及び位置特定のための方法、及びシステム
移動する物体の光電子工学的検出、及び位置特定のための方法、及びシステムを開示する。開示する方法、及びシステムは、内部を物体が通過する視野の一次元画像を撮影し、それらの画像において測定を行い、測定値の中から、視野内の物体に対応する可能性がある測定値を選択し、物体の種々の特性に応答する判断を行い、判断結果を示す信号を生成する。開示する方法、及びシステムによれば、極めて良好な物体識別、基準点の電気的設定、待ち時間なし、及び高い再現性といった利点、並びに当業者にとって明らかな他の利点が得られる。 (もっと読む)
マシンビジョンツールパラメータの自動決定
マシンビジョンツールパラメータを自動的に決定する方法が提示されており、この方法は、複数のイメージのそれぞれのイメージに対する所望のイメージ結果を示すようにマーキングすることと、マシンビジョンツールパラメータの組合せを選択することと、パラメータの組合せを使用して複数のイメージ上でマシンビジョンツールを実行し、複数のイメージのそれぞれのイメージに対する計算されたイメージ結果を形成し、それぞれの計算されたイメージ結果は複数の計算された尺度を含むようにすることと、それぞれの所望のイメージ結果を対応する計算されたイメージ結果と比較して、マシンビジョンツールパラメータの組合せに関連付けられている比較結果ベクトルを形成し、次いで、結果比較発見的方法を使用してマシンビジョンツールパラメータの組合せに関連付けられている比較結果ベクトルをマシンビジョンツールパラメータの前の組合せに関連付けられている前に計算されている比較結果ベクトルと比較し、マシンビジョンツールパラメータのどの組合せが全体として最良かを判定することとを含む。  (もっと読む)
(もっと読む)
実用的な3Dビジョンシステムの方法および装置
本発明は、物体の姿勢、例えばx軸、y軸およびz軸に沿った位置、ピッチ、ロール、およびヨー(あるいはその姿勢の1つまたは複数の特性)を、物体の複数の画像から収集されたデータの三角測量によって3次元で求める方法および装置を提供する。例えば一態様では、本発明は、較正ステップ中に、物体の画像をそれぞれの異なる視点から取得するように配設された複数台のカメラが、それぞれのカメラのレンズから発する、そのカメラの視野内のピクセル位置に対応する3D空間内の光線を特定するマッピング関数を識別するように較正される、3Dマシンビジョンのための方法を提供する。トレーニングステップでは、カメラに付随する機能が、取得すべき物体の画像内にある複数の期待パターンを認識するようにトレーニングされる。実行時ステップが、それらのパターンのうちの1つまたは複数の3D空間内での位置を、物体の画像内にあるそれらのパターンのピクセルに関する位置、および較正ステップ中に識別されたマッピングから三角測量する。 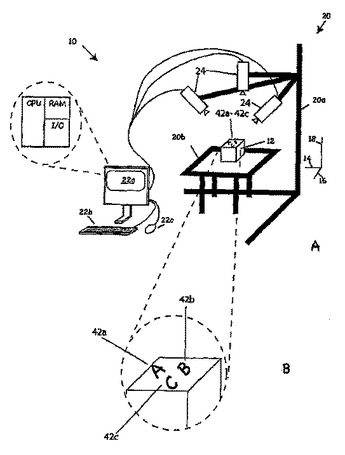 (もっと読む)
(もっと読む)
11 - 16 / 16
[ Back to top ]