
コグネックス・コーポレイションにより出願された特許
1 - 10 / 16
移動体制御システム、プログラム、及び移動体制御方法
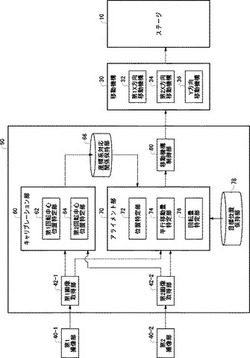
【課題】複数の撮像部が撮像したそれぞれの画像に基づいて移動体を制御する移動体制御システムにおいて、それぞれの撮像部に対して定められたそれぞれの撮像座標系の対応関係の精度を向上させる。
【解決手段】第1回転中心位置特定部62がそれぞれの第1画像に含まれるそれぞれの第1基準目印に基づいて、第1撮像座標系における第1点に対応する第1回転中心位置を特定する。第2回転中心位置特定部64がそれぞれの第2画像に含まれるそれぞれの第2基準目印に基づいて、第2撮像座標系における第1点に対応する第2回転中心位置を特定する。座標系対応関係保持部66が第1回転中心位置及び第2回転中心位置に基づく第1撮像座標系及び第2撮像座標系の対応関係を示す座標系対応関係を保持する。
(もっと読む)
マルチフェーズ同期化を有する分散視覚システム
本発明は、マスタ視覚システムプロセッサと少なくとも1台のスレーブ視覚システムプロセッサとを含む第1列(「マスタ」列であってもよい)を有する、複数のプロセッサの各々によって生成される視覚システム検査結果を同期化するためのシステムおよび方法を提供する。少なくとも1つの第2列(複数の「スレーブ」列の1つであってもよい)は、マスタ視覚システムプロセッサと、少なくとも1台のスレーブ視覚システムプロセッサを有する。各列内の視覚システムプロセッサは、与えられた検査サイクルにおいて取得および処理された画像から結果を生成する。検査サイクルは外部トリガまたはその他のトリガ信号に基づかせてもよく、プロセッサ/列の一部または全部に与えられた時間/サイクルで画像を取得および処理できるようにする。与えられたサイクルにおいて、多数の列の各々は動くライン上で後続する複数の領域のそれぞれの領域の画像を取得するように位置決めされ得る。同期化プロセスは(a)一意の識別子を生成し、第1列内のマスタプロセッサと連係してトリガ信号を一意の識別子と一緒にマスタ列内の各スレーブプロセッサ、およびマスタプロセッサとスレーブプロセッサの各々に送り、(b)第2列のマスタプロセッサを介して統合された結果を受け取り、一意の識別子と第1列からの結果から統合された結果を有する。次にプロセスは、(c)これらの結果が完全であり、各々の結果の一意の識別子が同一であれば、結果を統合して目標に送信する。 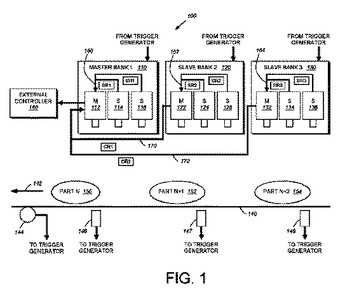 (もっと読む)
(もっと読む)
カメラのミスキャリブレーションの実行時決定のためのシステムと方法
本発明は、シーン内で取得された対象について、教示された対象モデルの観察された画像データと予想された画像データとのマッチングに基づいて定義される実行時アライメント得点の履歴統計定義に基づき、典型的にカメラ外部パラメータに関して、カメラのミスキャリブレーション(精度)の実行時決定(自己診断)のためのシステムと方法を提供する。この構成は、システムのカメラがキャリブレーションされた状態に留まっているか診断するためにビジョンシステムの実行時動作を中断し、および/またはビジョンシステムよって監視されている生産ラインを停止する必要を回避する。ビジョンシステムによって検査される対象または特徴は時間が経過しても実質的に同じであるという仮定の下で、ビジョンシステムは部分アライメント結果の統計を蓄積し、中間結果を保存して現在のシステム精度の指標として使用する。マルチカメラビジョンシステムに対しては、個々の問題のあるカメラを特定するために例示的にクロス確認を用いる。このシステムと方法により、劣化するカメラキャリブレーションに関するビジョンシステムの不具合をより迅速、廉価、簡明に診断することが可能となる。 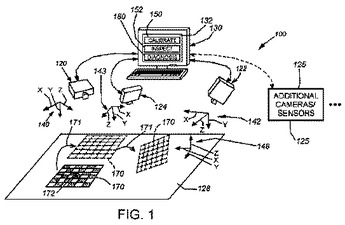 (もっと読む)
(もっと読む)
オブジェクト制御システム、オブジェクト制御方法、プログラム、及び回転中心位置特定装置

【課題】たとえ撮像部の設置位置がずれた場合でも、オブジェクトの目標位置への移動に時間が掛かることを抑制できるオブジェクト制御システムを提供する。
【解決手段】オブジェクト制御システムは、オブジェクトに対して予め定められた第1オブジェクト線を示す第1基準目印を含む第1画像を撮像する第1撮像部と、第1画像内の第1基準目印に基づいて、第1画像に対して予め定められた第1目標オブジェクト線と第1オブジェクト線との間の角度を示す第1差分角度を取得する角度取得部と、前記第1差分角度に基づいてオブジェクトを回転させる回転機構を制御するオブジェクト制御部とを備える。
(もっと読む)
ボールグリッドアレイデバイスの位置合わせ及び検査のためのシステム及び方法
不均一な特徴部を有するBGAデバイスなどの部品の高速位置合わせ及び検査のためのシステム及び方法を提供する。機械視覚システムのトレーニングタイム中に、粒度を選別するための幾何学解析の量及び位置合わせ有意ブロブの小さなサブセットが決定される。さらにトレーニングタイム中にボールがグループに関連付けられ、各グループは独自の検査用パラメータセットを有する。 (もっと読む)
動画像から静止画像を取得するためのシステム及び方法
本発明は、他の公知の方法、例えば等価露光時間インターバルで動作するコード化露光ぼけ除去(フラッターシャッター)によって取得された画像と比較してより簡便にぼけ除去できるシーンの動画像を取得するためのシステムと方法を提供する。露光時間インターバルにわたり光の測定の積分を停止および開始する代わりに、光生成電流がぼけ逆変換に対する解の条件を最適化する一時的切替えパターンに従って多数の電荷ストレージサイト間で切り替えられる。画像強度信号をストレージサイト間で切り替えることによって、露光時間インターバル中に利用可能な光エネルギーは全部電荷に変換されて捕捉され、一時的に分解された動画像の再現を形成する。等価露光時間インターバルにわたり利用可能な画像強度信号の約半分を放棄する関連方法と比較すると、そのような一時的に分解された画像は動画像をはるかに完全に表現し、単純な線形デコンボリューション技術を用いてより効果的にぼけ除去できる。 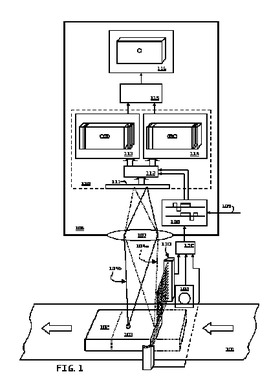 (もっと読む)
(もっと読む)
ビジョン・オン・チップ・プロセッサを用いてバーコードを捕捉および検出するためのシステムおよび方法
本発明は、CPU制御されたビジョン・システム・オン・チップ(VSoC)アーキテクチャに基づく効率的処理システムを用いてIDの特徴、例えば1Dバーコードを捕捉、検出および抽出するためのシステムおよび方法を提供する。本発明は、例示的に単一命令複数データ処理(SIMD)アーキテクチャで構成された線形アレイプロセッサ(LAP)を提供し、そこにおいてピクセルアレイの行の各ピクセルは類似の幅のアレイで個々のプロセッサに差し向けられる。ピクセルデータは、潜在的にID状の特徴を含んでいる関心領域(ROI)の大まかな検出と追跡を実行するフロントエンド(FE)プロセスで処理される。ROI検出プロセスは近隣操作におけるLAPの効率を最適化するために2部分で、すなわちピクセルアレイから画像ピクセルを読み出す間に起こる行処理ステップと、典型的に読出しが行われた後に起こる画像処理ステップで行われる。IDを包含したROIのピクセルアレイに対する相対運動が追跡および予測される。任意的にあるバックエンド(BE)プロセスは予測されたROIを用いて画像捕捉後に特徴抽出を実行する。特徴抽出は候補ID特徴を導出し、これらの候補ID特徴は検証ステップによって検証され、検証ステップはIDを確認し、精緻化されたROI、向きの角度および特徴セットを生み出す。これらの候補ID特徴は復号プロセッサまたはその他のデバイスに伝送される。 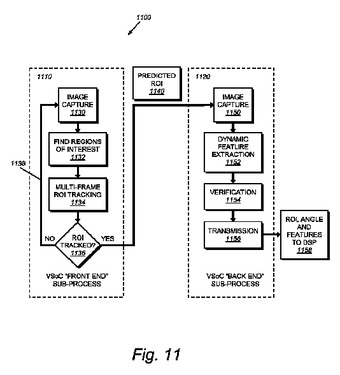 (もっと読む)
(もっと読む)
マシンビジョンを用いたオブジェクトの3次元アライメントのためのシステムと方法
本発明はモデル化されたオブジェクトまたはシーンの3次元アライメントを決定するためのシステムおよび方法を提供する。校正後、3D(ステレオ)センサスシステムはオブジェクトを観測して、当該オブジェクトを包含するシーンの実行時3D表現を導出する。各ステレオヘッドからの修正画像は、それらのエッジ特徴を強調するために前処理される。次に少なくとも2個(1対)の前処理された修正画像で、所定の特徴を最初の画像上に特定し、次いで同じ特徴を別の画像中に特定することによりステレオマッチングプロセスが同時に実行される。各対のカメラについて3Dポイントが計算されて3Dポイントクラウドが導出される。3Dポイントクラウドは各カメラ対の3Dポイントをワールド校正からワールド3D空間に変換することによって生成される。ポイントクラウドからの3Dデータの量は、より高水準の幾何学形状(HLGS)、たとえば線分を抽出することによって削減される。実行時に検出されたHLGSがモデルのHLGSに対応させられて、候補3D姿勢を生み出す。粗い採点で姿勢の数を減らす。さらに残った候補姿勢は一層精緻なプロセスに入れられる。次にこれらの残った候補姿勢は、たとえば候補姿勢の検出された3Dまたは2Dポイントをより大きいセットの対応する3次元または2次元モデルポイントに適合させることによって検証され、その場合に最も近いマッチが最良の精緻な3次元姿勢である。 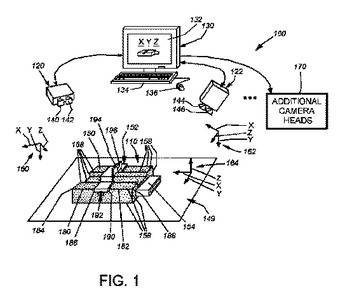 (もっと読む)
(もっと読む)
制御システム、制御方法およびプログラム
【課題】容易かつ短期間でロボットを制御する制御システムの誤差を解消し、ロボットを高い精度で制御すること。
【解決手段】制御システムは、ワークテーブルにマーキングするマーキング装置をロボットハンドとともに移動させ、ロボットハンドの位置を示すマークをワークテーブルにマーキングさせるマーキング制御部と、マークがマーキングされているワークテーブルの画像を撮像装置に撮像させる撮像制御部と、複数のマークのそれぞれがマーキングされたときにロボットハンドの位置を制御するために用いられていた複数の制御値、および画像におけるマークの位置に基づいて、撮像装置が撮像する画像内の位置とロボットハンドの制御値との対応関係を算出する対応関係算出部とを備える。
(もっと読む)
動的特徴検出の方法およびシステム
センサの視野内にある対象物の物理的特徴の動的特徴検出のためのシステムおよび方法が開示される。動的特徴検出は、複数のアラインメントに対応する複数の画像を捕捉および処理するために、対象物または材料の視野内の運動および/または視野を横切る運動を使用することにより、物理的特徴とピクセルグリッドとの偶発的アラインメントの効果を実質的に低減する。ある特徴の位置、重みおよびその他の属性の評価は、当該特徴が視野内を移動して複数のピクセルグリッドアラインメントに現れるときの当該特徴の外観の解析に基づいている。この結果得られる信頼性および正確性は先行技術の静的特徴検出システムおよび方法より優れている。 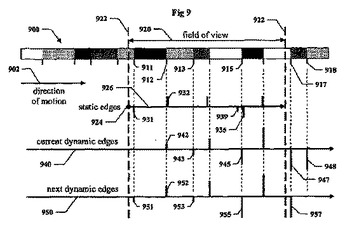 (もっと読む)
(もっと読む)
1 - 10 / 16
[ Back to top ]