
株式会社アプライド・ビジョン・システムズにより出願された特許
1 - 10 / 11
ステレオ透視装置およびそれを用いたステレオ観察方法
Notice: Undefined index: from_cache in /mnt/www/gzt_applicant_list.php on line 189
鉄筋領域抽出装置、鉄筋領域抽出方法及び鉄筋領域抽出プログラム
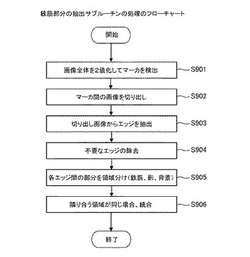
【課題】簡単に精度よく鉄筋の配筋情報を取得する。
【解決手段】配筋情報取得システム1において、携帯端末4は、背景バーBの部分に相当する画像全体から、マーカMK1及びMK2を検出する(S901)。次に、マーカMK1と、MK2との間にある画像を切り出す(S902)。その画像において、鉄筋の軸方向に垂直な方向で、ピクセルの輝度が不連続な箇所を検出することにより、領域の境界線となるエッジを抽出する(S903)。続いて、抽出されたエッジのうち、不要なエッジを除去する(S904)。次に、画像の輝度分布に対して度数分布を作成し、その度数分布に基づいて鉄筋、影、背景の3つの領域における代表輝度値を計算し、各代表輝度値を用いて、各エッジに挟まれた領域をいずれかに特定する(S905)。さらに、特定した領域のうち、エッジを挟んで隣り合う領域が同じである場合、その2つの領域を1つの領域として統合する(S906)。
(もっと読む)
液中異物検査方法

【課題】液体の性質や容器表面の情報に左右されることなく効率的に液中異物の有無を検出することができる液中異物検査方法を提供する。
【解決手段】被検査体を連続的に搬送し、所定の検査位置にて単一の被検査体に対して光を照射するとともに隔離配置された第1及び第2撮像手段により被検査体を同時に撮像し、第1撮像手段によって撮像された第1画像と第2撮像手段によって撮像された第2画像とからそれぞれ所定画素以上のシルエット像の有無を検出し、第1及び前記第2画像に同一のシルエット像が検出された場合には、予め定められた第1及び第2撮像手段の各位置と第1及び第2画像のシルエット像位置に基づいてシルエット像の3次元位置を三角法により測定してシルエット位置情報を得るとともに、シルエット位置情報と容器表面の3次元位置が予め記憶された容器位置情報とを比較してシルエット像が容器表面に位置するか否かを判断する。
(もっと読む)
配筋情報取得装置及び配筋情報取得方法
【課題】立体的に配置された鉄筋の配筋情報を取得する。
【解決手段】撮影者は、撮影対象部位2を決定し(S702)、撮影対象部位2の鉄筋のうち、4隅の鉄筋にマーカMKを取り付け、1の鉄筋に方位確認用マーカDMKを取り付ける(S703)。次に、鉄筋内側の中心部付近に全方位カメラ3を挿入し(S706)、その中心部から360度全周囲の鉄筋を全方位カメラ3で撮影し(S707)、撮影した全周囲画像のデータを全方位カメラ3から携帯端末4に取り込む(S708)。携帯端末4は、取り込まれた全周囲画像を方位確認用マーカDMKに基づいて平面画像に展開する(S709)。続いて、展開した平面画像において方位確認用マーカDMK及びマーカMKを検出することにより、その平面画像を4面の画像に分割する(S710)。さらに、分割した各面の画像に対して画像処理を行い、鉄筋の径長やピッチを計算する(S711)。
(もっと読む)
鉄筋撮影用具及び配筋情報取得方法
【課題】簡単に精度よく鉄筋の配筋情報を取得する。
【解決手段】携帯端末4は、背景バーを背景にした異形鉄筋の画像、カメラ焦点距離、マーカ内の基準長及びマーカ間距離を取得し(S802)、画像の補正及び二値化を行う(S803)。次に、二値化した画像から、主筋が垂直線となす角度θ及び背景バーが水平線となす角度φを測定する(S804)。続いて、元の画像を−φだけ回転し、背景バーを水平にする(S805)。そして、背景バーの部分だけの画像を抽出し(S806)、マーカの、背景バーに沿った最大ピクセル数をカウントする(S807)。さらに、カメラからマーカ及び背景バーまでの距離を求め(S808)、各鉄筋の径を推定する(S809)。
(もっと読む)
画像処理システム及び方法
【課題】高圧環境下で撮影しても、常圧環境で撮影した画像と同等の画像が得られる、画像処理システム及び方法を提供する。
【解決手段】ビューポート11Aを有する耐圧容器11内の撮影装置12を用いビューポート11Aを経由して耐圧容器11外の撮影対象物1を撮影して生成した撮影画像を処理する。撮影装置12により形成される像が耐圧容器11外の媒質の状態及びビューポートの状態に応じて移動する量に関して、補正情報を格納する補正情報格納手段15と、耐圧容器11が高圧環境下にある状態で、撮影装置12で生成される撮影画像上の撮影対象物1における各対象点への視線ベクトルを、補正情報格納手段15に格納されている補正情報により補正して、撮影画像を処理する撮影画像補正手段16と、を備える。
(もっと読む)
ロボット制御システムの教示用補助具、その教示用補助具を用いた教示方法、およびその教示方法によって教示を行うロボット制御システム
【課題】ティーチング作業をより簡略するとともにティーチング時間のさらなる短縮を可能とするためのロボット制御システムの教示用補助具、その教示用補助具を用いた教示方法、およびその教示方法によって教示を行うロボット制御システムを提供する。
【解決手段】撮像装置を用いて教示を行うことが可能なロボット制御システムの教示用補助具の一実施形態であるティーチングツール50は、角錐面52a、52b、52cの色が互いに異なる三角錐部52を有するツール本体51と、このツール本体51に連結されたハンドル54とを備える。
(もっと読む)
配筋情報取得装置及び配筋情報取得方法
【課題】簡単に精度よく異形鉄筋の配筋情報を取得する。
【解決手段】400万画素以上の設定が可能であり、かつ、オートフォーカス機能を切れるデジタルカメラを決定し(S701、S702)、異形鉄筋を含む撮影対象部位を決定する(S705)。次に、撮影対象となる複数の異形鉄筋のうち、両端2本にマーカを付与し(S707)、デジタルカメラを用いて2m離れた位置から撮影する(S708)。そして、デジタルカメラから携帯端末へ撮影された異形鉄筋の画像データを転送し、携帯端末を用いて画像処理を実行する(S714)。画像処理においては、画像データにおける1ピクセルあたりの長さである1ピクセル長を特定し、画像データにおける異形鉄筋の径長のピクセル数をカウントし、径長のピクセル数と、1ピクセル長とを乗ずることによって、径長を算出する。
(もっと読む)
三次元計測システム、および、三次元計測方法
【課題】より広範囲に渡って、対象物を高精度で計測する計測システム等を提供する。
【解決手段】全域カメラ20は、砂場S及び全外部標定10を含む全域を撮影する。一方、エリアカメラ30a,30bは、雲台40a,40bにより回動自在であり、全域内の各エリアのうち、何れかのエリアを撮影する。処理制御装置50は、全域カメラ20が撮影した全域画像から砂場Sに残された痕跡が指定されると、対応するエリアを特定し、そのエリアをエリアカメラ30a,30bが撮影できるように雲台40a,40bを回動させる。そして、エリアカメラ30a,30bが撮影したエリア画像にて計測ポイントが指定されると、各エリア画像の外部標定10の絶対位置等に基づいて、計測ポイントの三次元位置を算出し、最終的には、踏切板Fからの跳躍距離を算出する。
(もっと読む)
ステレオ透視装置およびそれを用いたステレオ観察方法
【課題】X線等の被検体を透過する放射線を用いることにより被検体の寸法や形状によらず内部構造の観察や内部欠陥等を検出することができ、被検体を回転させる簡素な構造で装置を小型化することができる汎用性、取扱い性に優れるステレオ透視装置の提供。
【解決手段】X線源5と、被検体20を移動自在に保持する位置設定機構6と、前記被検体20を挟んで前記X線源5に対向配置され前記被検体の透過画像を検出する平面状のイメージセンサ10と、前記位置設定機構6により少なくとも二種類の回動角度で保持されたときに前記イメージセンサ10で得られる前記被検体20の透過画像に基づいて、当該被検体20の三次元構造を表す三次元座標データを生成する座標データ生成部(制御部3)とを備えたことを特徴とするステレオ透視装置。
(もっと読む)
1 - 10 / 11
[ Back to top ]