
アキュレイ インコーポレイテッドにより出願された特許
1 - 10 / 13
電子スイッチを使用した定在波線形加速器のインターリーブするマルチエネルギーX線のエネルギー操作
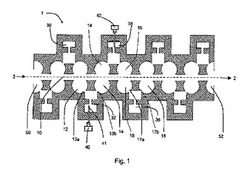
本開示は、電子スイッチの発熱が好都合に低い、少なくとも2つの異なるエネルギー領域のX線の生成に使用するための定在波線形加速器(LINAC)の高速切り替え操作のためのシステムおよび方法に関する。ある実施形態では、LINACの高速切り替え操作中、電子スイッチの発熱は、定在波LINACのそれぞれの側面空洞内に配置されている複数の電子スイッチの制御され、タイミング調整された起動により、または電子スイッチを含む変更された側面空洞の使用により、好都合に低く維持することができる。 (もっと読む)
治療計画のための連続的最適化
放射線治療計画のための方法および装置について記載する。本方法は、複数の放射線治療計画パラメータを受信することと、複数の放射線治療計画パラメータを連続的に最適化することとを含む。 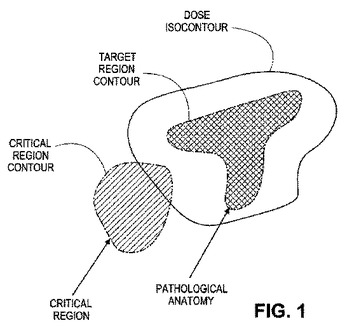 (もっと読む)
(もっと読む)
ターゲットの動きに基づくX線像形成の制御

ターゲットを処置するために画像ガイド型処置が遂行される。画像ガイド型処置を遂行するために、ターゲットの動きを表す測定データが取得される。1つ以上のX線像のタイミングが測定データに基づいて決定される。ターゲットの位置を使用してターゲットにおいて処置が遂行される。 (もっと読む)
少なくとも1つの冗長関節を有する7つ以上の自由度ロボットマニピュレータ
線形加速器(LINAC)およびLINACに連結するロボットマニピュレータを含む、ロボット治療施行システム。このロボットマニピュレータは、7つ以上の自由度に沿ってLINACを移動させ、7つ以上の自由度の少なくとも1つは、冗長自由度であるように構成される。 (もっと読む)
患者位置決めアセンブリ
【課題】支持装置の位置及び配向を必要に応じて調整することができるような、支持装置の動作を制御する動的動作制御機構を含む患者位置決めアセンブリを提供する。
【解決手段】治療的放射線処置用のロボット患者位置決めアセンブリは、処置中に患者を移動しかつ支持するためのロボット位置決め装置と、ロボット位置決め装置の位置を検出するセンサ・システムと、ロボット位置決め装置の位置データを受信するためにセンサ・システムに動作可能に接続されかつロボット位置決め装置の動作を制御するロボット位置決め装置に動作可能に接続された制御装置を含む。制御装置は、ように、ロボット位置決め装置に装着された患者内の処置標的が治療的放射線処置システムの放射線源と適切に位置合わせされるように、センサ・システムから受信したロボット位置決め装置の位置を表す情報に応じてロボット位置決め装置の動作を制御するように構成されている。
(もっと読む)
内部目標物の自動相関モデリング
患者内の目標物の動きの相関モデルを生成するときに、撮像システムによる画像収集のタイミングを自動的に制御する方法および装置。 (もっと読む)
放射線治療投与システムに対して最適化された経路横断の判断
放射線投与システムのための経路横断最適化の判断に関する技術を提供する。本発明は、放射線投与システムにおける最適化した経路横断を判断するための装置及び方法を説明する。一実施形態では、放射線投与システムにおける最適化した経路横断を判断する段階は、ターゲットに放射線を投与するための治療計画に利用可能にされた放射線源の位置を各々が表す治療計画に使用される複数の空間ノードを準備する段階と、治療計画に従って放射線が投与されないいくつかの未使用空間ノードを複数の空間ノードの中から識別する段階と、治療計画を実施する時に放射線源によって未使用のノードの1つ又はそれよりも多くへの進行を飛び越す段階とを伴っている。他の実施形態も説明する。 (もっと読む)
コリメータ交換装置
放射線治療システムの一以上のコリメータを自動交換するように構成された放射線治療システムのコリメータ自動交換装置。 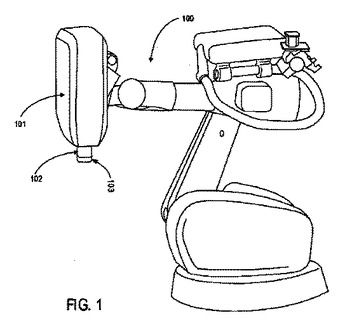 (もっと読む)
(もっと読む)
直接のターゲット登録を用いたターゲット追跡
【課題】放射線処置中に移動する放射線ターゲットを追跡するシステムを提供する。
【解決手段】2D輪郭及び適応窓を使用して映像誘導放射線処置中に放射線ターゲットを直接的に追跡するためのシステム、方法及び装置。
(もっと読む)
画像誘導放射線手術における平行立体視ジオメトリ
患者の処置中3D位置を特定するため、及び患者の処置前3D走査と患者の3D処置中位置とを位置合わせするための画像誘導放射線処置システムでの方法及び装置。 (もっと読む)
1 - 10 / 13
[ Back to top ]