
インターナショナル リモート イメイジング システムズ インコーポレイテッドにより出願された特許
1 - 5 / 5
自動流動顕微鏡のための粒子抽出
物体の境界の所在を突き止める方法及び装置。複数の画素を有する物体の電子画像を形成する。物体のエッジセグメントを表す画素の群を識別する。パッチを画素群の周りに形成し、各パッチをこれが画素群のうちの一つを完全に含むよう寸法決めすると共に位置決めする。互いに所定量だけオーバーラップしたパッチのうちのどれか2つを互いにマージして2つのマージしたパッチを完全に含むよう寸法決めされると共に位置決めされたマージ済みパッチを形成するパッチマージプロセスを実施する。マージプロセスは、所定量だけ互いにオーバーラップしたパッチとマージ済みパッチが存在しないようになるまで互いにオーバーラップしているパッチ及びマージ済みパッチの任意のものについて続行する。マージ済みパッチのうちの一つの中に含まれたエッジセグメントを全て、物体の境界を表すものとして相互に関連付ける。  (もっと読む)
(もっと読む)
検尿診断システム用フローセルおよびその製造方法
【課題】 希薄流体サンプル中の粒子を分析する方法およびシステム、より詳しくは、検体流体(該検体からこの光学的画像が得られる)の薄い流れを作るフローセルを提供することにある。
【解決手段】 シース流体中を流れる検体流体を試験するフローセル。フローセルのハウジングは中空流路を形成し、該流路は、高さが小さくなる幾何学的フォーカシング部分および試験領域を有している。カニューレは、初期速度をもつ検体流体の流れとして、検体流体を流路内に射出する。シース流体は、検体流体が射出される点を通るときに第一速度をもつように、流路を通って流れる。初期速度は、リニア流量フォーカシングを介して検体流体の流れの高さをフォーカスする第一速度より小さい。顕微鏡およびカメラが、試験領域を通る検体流体のフォーカスされた流れを撮影する。  (もっと読む)
(もっと読む)
マルチレベルコントローラシステム
図5のレベル化されたシステムアーキテクチャ(100)は、互いに制御し合い、最終的にはシステムコンポーネントを制御するマルチレベルプロセッサ及び(又は)コントローラを有する。ホストレベルコントローラ(56)は、ホストプロセッサを含み、レベル−1コントローラ(52)は、マスターコントローラを含み、レベル−2コントローラ(54)は、4つのコントローラ(54a,54b,54c,54d)を含み、レベル−3コントローラは、レベル−2コントローラとシステムコンポーネントとの間のインタフェースを取る1以上のコントローラを含む。モータ、ポンプ及び弁は、レベル−3コントローラによって制御され、レベル−3コントローラは、Cでプログラムされており、代表的には、プロセッサエンジニアが第2及びレベル−2コントローラの動作を制御するために接近する状態記録のように可変ではなく、システムは、実行される1組の状態を識別し、1組の状態中の現在の状態を実行するのに出される必要のある状態コマンドを出すことによりプロセスを実行する。 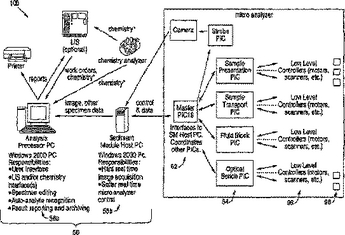 (もっと読む)
(もっと読む)
均一流容積型ポンプ
【課題】 反復可能な既知量の均一流体流が得られかつ非使用時にチューブにフラットスポットが生じることがない容積型ポンプを提供することにある。
【解決手段】 ポンプ組立体とカセット組立体とからなる容積型ポンプ。ポンプ組立体は、キャビティを形成する上下のハウジング部分と、キャビティ内に配置されるアームと、該アームの遠位端に取付けられたローラと、アームの近位端に取付けられた、アームを回転させるためのモータとを有している。カセット組立体は、キャビティ内に着脱可能に配置され、かつチャネルが形成される環状圧縮面を形成する上下のカセットハウジング部分を有している。中空圧縮チューブがこの長さに沿って延びているフランジを備え、中空圧縮チューブは、フランジをチャネルに係合させることにより圧縮面に固定される。  (もっと読む)
(もっと読む)
階級重みを使用する流体サンプル分析

【課題】サンプル内の粒子の濃度を決定する方法及びシステムを提供する。
【解決手段】ほとんどの自動的な粒子分類方法は、誤差を生じるものである。本発明は、粒子分類の精度を改善し、同時にオペレータに要求される手作業の精査時間の量を短縮する方法を提供する。本方法は、分類誤差の頻度に対処する統計的に導出された補正係数である階級重みを使用する。第1の階級重みと第2の階級重みが、それぞれ第1の階級と第2の階級に割り当てられる。第1及び第2の階級の各々における粒子の数にそれぞれ第1の階級重みと第2の階級重みが乗算されて、階級の各々における粒子の補正数を生成する。粒子が再分類された場合、階級重みは、再分類に応じて再計算される。本方法は、サンプル内の全ての粒子が分類される完全分類又はサンプル内の粒子の部分集合の選択分類と共に使用可能である。
(もっと読む)
1 - 5 / 5
[ Back to top ]