
マリン・サイバネティクス・アクティーゼルスカブにより出願された特許
1 - 5 / 5
船舶の電力管理システムの試験のための方法およびシステム
船舶の電力管理システムを試験するためのシステムであって、上記電力管理システム(PMS)は電気エネルギーを生成するシステムを制御するように配置される。上記システムは、上記PMSの機能試験および/または障害モード試験のために、上記PMSに接続されるように配置されたシミュレータを含み、シミュレータは上記シミュレートされた電力消費システム(PCS)の所望の状態に関する実のおよび/またはシミュレートされた制御信号を受信するように配置されたシミュレートされた電力消費システム(PCS)と、上記実のPMSにシミュレートされた信号を供給するように配置された上記シミュレートされたPCSにシミュレートされた電力を供給するように配置されたシミュレートされた電力発生モジュールとを備え、上記実のPMSは上記シミュレートされた信号に対する応答として上記シミュレートされた電力発生システムに制御信号を供給するように配置され、上記シミュレートされた電力発生システムは上記制御信号に対する応答として上記シミュレートされたPCSにシミュレートされた電力を供給するように配置されている。 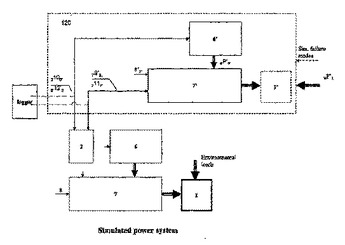 (もっと読む)
(もっと読む)
動的位置決めシステム用の試験方法及びシステム
センサ(8)から実際の測定信号(7)を受信し、かつ制御信号(13)をアクチュエータ(16、17、18)に提供する船舶(0)制御システム(2)を試験する方法であり、−前記制御システム(2)が1つ以上の前記実際の測定信号(7)を受信する信号変更用コンピュータ(80)に接続され、−前記信号変更用コンピュータ(80)が、前記実際の測定信号(7)を前記実際の測定信号(7)の実際の値に依存する変更された測定信号(70)に変更し、−前記信号変更用コンピュータ(80)が、前記変更された測定信号(70)を前記制御システム(2)に送り、前記1つ以上の変更された測定信号(70)の入力値が前記実際の測定信号(8)の入力値の一部又は全てを取り替えて、−前記制御システム(2)が、前記1つ以上の変更された測定信号(70)に作用し、かつ影響されない実際の測定信号(7)を残して、1つ以上のセンサ(8)の中で発生すると想定される前記変更された測定信号(70)が表したエラーに対して、前記制御システム(2)が望ましい方法で動作するかどうかを試験することを特徴とする方法である。 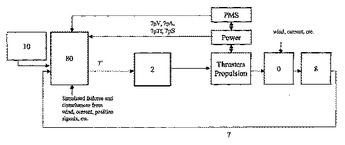 (もっと読む)
(もっと読む)
船舶用の制御システムを試験するシステム及び方法
船舶(4)内の制御システム(2)を試験するためのシステムである。ここで、制御システム(2)は船舶(4)を制御及びモニタするように構成される。このシステムは下記の特徴、すなわち、1つ以上のセンサ信号(7)を信号線(12)を介して制御システム(2)に送るために船舶(4)に搭載された1つ以上のセンサ(8)と、1つ以上の望ましい位置、進路、速度(9)などを命令信号線(11)を介して制御システム(2)に送るように構成された船舶(4)に搭載された命令入力装置(10)と、信号線(14)を介してアクチュエータ(3)に制御信号(13)を送るために、センサデータ(7)及び命令信号(9)に基づいて船舶のアクチュエータ(3)に対する制御信号(13)を計算するための制御システム(2)内のアルゴリズム(31)と、1つ以上のシミュレートされたセンサ信号(7’)及び/又はシミュレートされた命令信号(9’)を遠隔の試験検査室(40)から制御システム(2)に送信するための1つ以上の通信線(6)と、船舶(4)の以前の状態(7,7’)、制御信号(13,13’)、及び動的なパラメータ(5)に基づいて、船舶モデル(4’)の新しい動的な状態(7’)をシミュレートするためのアルゴリズム(32)を含むシミュレータ(30)とを備え、少なくとも1つの前記望ましい位置、進路、速度などを得るために、実際の及び/又はシミュレートされたセンサ信号(7,7’)又は実際の及び/又はシミュレートされた命令信号(9,9’)に基づいて、制御システ(2)ム内で制御信号(13)の計算を続けるために、通信線(6)がシミュレートされたセンサ信号(7’)の形式で船舶モデル(4’)の新しくシミュレートされた状態を制御システム(2)に送り戻すように構成され、かつ通信線(6)は遠隔の試験検査室(40)への制御信号(13)及び制御信号(13’)のような形式によって、制御システム(2)からの応答を送信するように構成される。 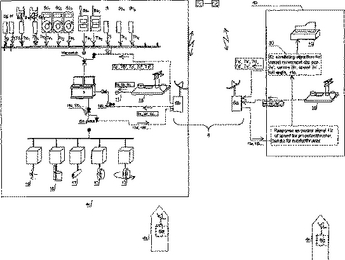 (もっと読む)
(もっと読む)
動的な位置決め及び電力管理システムを組み合わせて試験する方法
船舶(0)の制御システム(5)を試験する方法である。制御システムは、望ましい位置、速度などの入力命令(51)を入力命令装置(50)から受け取り、かつ制御信号(6、62)を電気スラスタ又はプロペラモータ(32、35)などの作動装置(3)に送る。船舶は、信号(7、71、72、..)を制御システムに送り返す位置センサ(81)などのセンサ(8)を備えている。作動装置は、電力管理システム(2)有する船上の電力システム(1)からエネルギーを受け取る。この方法は以下を含む、すなわち、シュミレータ(100)が船から信号(6、7)を受け取り、シミュレート作動装置モジュール(3’)が、シミュレートされた船(0’)の動的な動作を計算するためのアルゴリズムを含むシミュレート力をシミュレート船モジュールに提供し、またシミュレートセンサモジュール(8’)がシミュレートされた船の計算された動的な状態を記述するシミュレートセンサ信号(7’)を与え、風や潮流などのシミュレート外乱(9’)のもとで作られたシミュレートセンサ信号(7’)を、制御信号を実の作動装置に送り続ける制御システムに送る。 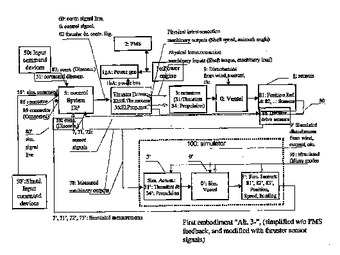 (もっと読む)
(もっと読む)
船舶の制御システムを検査するための方法及びシステム
船舶(4)の制御システム(2)を検証するための方法であって、上記制御システム(2)は、その動作状態において、センサ(8)からのセンサ信号(7)及びコマンド入力装置(10)からのコマンド信号(9)を受信するとともに、応答として、制御信号(13)をアクチュエータ(3)に対して供給することにより、上記船舶(4)の所望の位置、速度、進路又は他の状態を維持する方法において、時間(t0)中に、実際のセンサ信号(実センサ信号)(7a、7b、7c、……)の受信を切り離して、上記実際のセンサ信号を、検査信号源(41)からの人工の測定値(7a’、7b’、7c’、……)の検査シーケンス(T0)と置き換えるステップと、人工のセンサ信号(7、7’)に基づいて上記制御システム(2)を機能させて、上記第1の時間(t0)における上記第1の検査シーケンス(T0)に対する応答(SO)として制御信号ロガー(42)に記録される制御信号(13’)を生成するステップと、検査シーケンス(T0)に対する応答(S0)を上記制御システム(2)の「署名」応答(S0)として記憶するステップとを含み、その後の時間(t1、t2、t3、……)において、制御システム(2)に対して入力される検査シーケンス(T0)を使用して、その後の応答(S1、S2、S3、……)を記録するとともに、上記その後の応答(S1、S2、S3、……)が署名応答(S0)にほぼ類似しているかどうかを決定して、上記制御システム(2)が変更されているか否かを検証するという目的をもっていることを特徴とする方法。  (もっと読む)
(もっと読む)
1 - 5 / 5
[ Back to top ]