
IKOMAロボテック株式会社により出願された特許
1 - 2 / 2
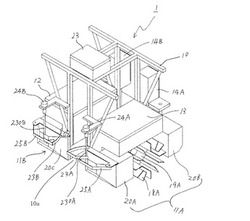
水田除草ロボット
【課題】条間、株間を自由に移動し、且つ、安定した除草効果が得られる除草ロボットを提供する。
【解決手段】水田除草ロボット1は、水田の稲株が通過可能な逆凹状の空間を有したメインフレーム10は、その下部に、車輪19A,19B、車輪19A,19Bを回転駆動する駆動部11A,11B、車輪19A,19Bの前後に配置されて水田除草ロボット1に浮力を生じさせる第1のフロート20A〜20D、全部に設けられて水田内の稲株を検知するセンサレバー23A,23B、メインフレーム10に搭載されたセンサ類に基づいて駆動部11A,11Bを駆動し、車輪19A,19Bの回転を制御する。これにより、水田除草ロボット1は稲株を避けながら自律走行する。
(もっと読む)
歯車減速装置

【課題】複雑で大型の機構を使用せずに減速比を高くし、且つ、入力軸を中空で径の大きなものにする。
【解決手段】
太陽歯車11、内歯車21、遊星歯車31及びキャリア33から成る遊星歯車装置と、モータ5とを有する。太陽歯車、内歯車、及び、キャリアには、それぞれ、同軸状に固定した第1入力軸10、第2入力軸20、及び、出力軸を設ける。第1及び第2入力軸にはモータ5の出力軸の回転駆動力を、プーリー式入力手段13,14、15及び歯車式入力手段22,23を介して入力する。
(もっと読む)
1 - 2 / 2
[ Back to top ]