
ロッタ有限会社により出願された特許
1 - 2 / 2
走行ロボットのやり直し走行、そのティーチング方法および制御方法
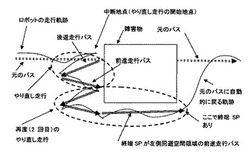
【課題】パスとランドマークの系列からなる経路情報に基づいて出発点から目的地点まで移動する歩行ロボットが、経路上にある障害物や道路工事中の箇所に遭遇したとき、走行できなくなる。そこで、経路情報に基づく走行を中断し、走行をやり直してから元の経路に戻る方法が課題である。
【解決手段】走行をやり直す方法を定型経路情報で表し、ティーチングで作成する。定型経路情報とは、経路情報を構成するパスやランドマークの種類や順序は決まっているが、パスの始端・終端の位置方位などの値は、実行時のセンサーのデータや通路幅などによって決まる形式の経路情報を言う。
【効果】走行ロボットの車体やセンサー、コンピュータなどは常に改良されて行く。改良の度にソフトウエアを修正する労力と現場でテストするのは大変である。本発明は、定型経路情報をティーチングにより改良するだけで良いので、労力と手間が大幅に少なくなる。
(もっと読む)
自律移動型車椅子ロボットのビデオカメラ及びセンサの取り付け構造及び取り付け調整方法

【課題】利用者が車椅子に乗る時、および車椅子に座っているとき利用者の身体の一部がビデオカメラの視野に入ることがないようにビデオカメラを取り付ける構造を提供する。
【解決手段】ビデオカメラ6により周囲の環境を撮像・処理するとともに、センサ7,12により障害物を検出しながら自律移動する車椅子ロボットであって、前記ビデオカメラ6が前記車椅子ロボットの左右いずれかのフロントパイプ1に添設されたポール4の地上高120cm〜140cmの範囲で取り付けられていることを特徴とする。
(もっと読む)
1 - 2 / 2
[ Back to top ]