
株式会社ケー・エフにより出願された特許
1 - 2 / 2
ベルトコンベヤ制御装置およびコンピュータプログラム
【課題】ベルトコンベヤの移動によって生じるベルト弛みやベルト伸張を制御する制御装置を提供する。
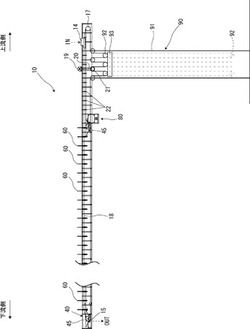
【解決手段】ヘッドプーリー45を所望する位置に移動させるために、移動位置設定値を入力し記憶部53に記憶する。回転数算出手段が、記憶部53に記憶された移動位置設定値と電動ウィンチドラム81の円周データから電動ウィンチドラム81の回転数を算出する。次に、ウィンチユニット80が、前記回転数に応じてワイヤーロープ83により回転軸45bをレール部材41a、41bに沿って移動させる。この移動によって、ヘッドプーリー45およびテールプーリー17に掛け渡された搬送ベルト18が弛むまたは伸張し、搬送ベルト収納機構90に対し搬送ベルト18を収納又は排出する。
(もっと読む)
搬送位置可変ベルトコンベヤ

【目的】 ベルトコンベヤが輸送物を運搬中であっても、その輸送物を自在な位置にて連続的に積載可能な技術を提供する。
【構成】 始点位置に位置するテールプーリー(17)と、終点位置に位置するヘッドプーリー(45)と、それらテールプーリー(17)およびヘッドプーリー(45)に掛け渡された搬送ベルト(18)とが回転することで、輸送物を始点位置から下流側に位置する終点位置へ搬送させる。レール部材(41a,41b)は、ヘッドプーリー(45)の回転軸(45b)を支持して移動軌跡軌道を形成する。ヘッドプーリー移動手段(43,44)が、レール部材(41a,41b)に沿って回転軸(45b)を移動させる。この移動によって、搬送ベルト(18)が弛んだ場合には、搬送ベルト収納機構(90)に搬送ベルト(18)を収納し、伸張した場合には、搬送ベルト収納機構(90)から搬送ベルト(18)を排出する。
(もっと読む)
1 - 2 / 2
[ Back to top ]