
モバイルマッピング株式会社により出願された特許
1 - 5 / 5
ナビゲーション装置、ナビゲーション方法、および、自動車
【課題】非接触慣性航法装置を用いた際に、GPS測位が困難な経路上での精度の高いナビゲーションを実現できるようにすることを課題とする。
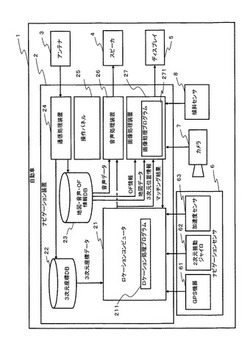
【解決手段】道路ネットワークに対応するXYZ座標系の3次元座標データに対応させて、事前に撮影された情景のオプティカルフロー情報を記憶する3次元座標DB22および地図・音声・OF情報DB23を使用する。非接触慣性航法装置を有するナビゲーションセンサ6を用いて、現在位置、移動距離、および、進行方向に関する情報を算出する処理において、カメラ7から取得される画像のオプティカルフロー情報と地図・音声・OF情報DB23のオプティカルフロー情報とのマッチングを行い、不一致の際は、3次元位置情報の補正を実行する。
(もっと読む)
ナビゲーション装置、ナビゲーション方法、および、自動車

【課題】非接触慣性航法装置を用いた際に、経路状態に応じて精度の高いナビゲーションを実現できるようにすることを課題とする。
【解決手段】3次元座標DB22は、道路形状に応じて自動車の移動に加速を伴うと予測される座標位置に対してあらかじめ属性を付与した3次元座標データを記憶する。ロケーションコンピュータ21は、現在位置、移動距離、および、進行方向に関する情報を算出する処理において、ナビゲーションセンサ6においてあらかじめ設定された閾値以上の加速度を検出した場合、属性を参照して、加速度の変化をキャンセルして移動距離を補正して、3次元マップマッチングを実行する。
(もっと読む)
3次元マップマッチング処理装置、3次元マップマッチング処理方法、3次元マップマッチング処理プログラム、ナビゲーション装置、ナビゲーション方法、ナビゲーションプログラム、および、自動車
【課題】3次元座標データを用いて移動体の現在位置をマップマッチングするときに誤差の発生を抑制できるようにすることを課題とする。
【解決手段】ロケーションコンピュータ21では、現在位置および進行情報の情報に基づいて2次元マップマッチングが実行されて2次元位置情報が算出される。その2次元位置情報と3次元座標DB22に記憶される3次元座標データとに基づいてZ座標位置が算出される。さらに、移動体の移動上、Z座標位置に基づいてZ軸方向の勾配差が検出され、その勾配差に基づいて移動距離が補正されて3次元位置情報が算出される。画像処理装置27では、3次元位置情報に基づいて経路上の案内画像が生成される。その案内画像には自動車の傾斜補正が加味されて、カメラ7で撮影された実際の風景画像が重畳される。その結果はディスプレイ5に表示出力される。
(もっと読む)
地図作成支援システム
【課題】車両等が走行できる道路と遊歩道等とを区別し、三次元の位置情報を有する道路データ及びそれに対応する画像から三次元地図を作成する地図作成支援システムを提供することを課題とする。
【解決手段】位置情報を取得するGPS受信手段11と、前記位置情報に対応した画像を取得する撮影手段12、13と、前記撮影手段に撮影を指示する画像取得手段16と、取得した位置情報を記憶域に記録し、前記位置情報及び画像を所定の移動距離で取得すべく同期をとり、前記GPS受信手段及び前記画像取得手段に取得時期を通知する計測手段14と、所定の移動距離を測定して前記計測手段に通知する時期を生成する発生手段15と、撮影した画像を保存する画像保存手段17とを備える計測車両1と、前記位置情報と画像とから地図を作成する地図作成手段3とを有することを特徴とする。
(もっと読む)
広告掲示権入札管理システム
【課題】位置情報検索と連動させた広告掲示権の入札を管理するシステムを提供する。
【解決手段】広告主端末及びユーザ端末と通信ネットワークを介して接続された入札管理サーバを有する広告掲示権入札管理システムにおいて、対象地図を格子状に分割することにより定義された複数の地図メッシュのうちの1つを指定する地図メッシュ指定情報と、広告と、入札価格とを含む入札情報を広告主端末から受信し、関係付けて記憶し、ユーザ端末により表示要求された地図エリアに含まれる地図メッシュの各々に関係付けられた全ての入札価格に基づいて地図メッシュの各々に関係付けられた全ての広告の各々の掲示順位を決定し、決定された掲示順位と共に広告の各々を送信する。
(もっと読む)
1 - 5 / 5
[ Back to top ]