
ニューロサイエンシーズ リサーチ ファンデーション インコーポレイテッドにより出願された特許
1 - 7 / 7
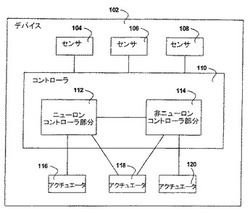
ハイブリッド制御デバイス
【課題】ロボット、特に周囲の状況について学習するように適合されたロボットを提供する。
【解決手段】ロボット用ハイブリッド制御システムは、ニューロン制御部分と非ニューロン制御部分とを含むことができる。
(もっと読む)
予測的運動制御のための小脳モデルを有する頭脳ベース・デバイス

モバイル頭脳ベース・デバイス(BBD)は、実世界環境との相互作用を測定する予測的運動制御に用いられる脳の小脳領域に類似した疑似神経システムによって導かれる、センサとエフェクタを有するモバイル・プラットフォームを含む。疑似神経システムは、前小脳核(PN)、プルキンエ細胞(PC)、深小脳核(DCN)及び下オリーブ(IO)を含む神経領域を有して、実世界環境において移動中のBBDの回転及び速度制御を予測する。BBDは、トレーニング及びテストを受け、疑似神経システムは、遅延適格性追跡学習ルールに基づいて制御機能を学習し実行する。 (もっと読む)
ハイブリッド制御デバイス
ロボット用ハイブリッド制御システムは、ニューロン制御部分と非ニューロン制御部分とを含むことができる。 (もっと読む)
神経モデリングのためのアドレス機構及び特殊目的プロセッサを使用する脳ベースの装置
特殊目的プロセッサ(SPP)は、現場でプログラム可能なゲートアレー(FPGA)を使用して、多数の神経素子をモデリングする。FPGA、又は同様のプログラム可能な装置は、前シナプス計算、後シナプス計算及び塑性計算を並列に行なう複数のコアを有することができる。各コアは、神経モデルの複数の神経素子を実施することができる。 (もっと読む)
特殊目的プロセッサを使用する神経モデリング及び脳ベースの装置
特殊目的プロセッサ(SPP)は、現場でプログラム可能なゲートアレー(FPGA)又は同様のプログラム可能な装置を使用して、多数の神経素子をモデリングする。FPGAは、前シナプス計算、後シナプス計算及び塑性計算を並列に行なう複数のコアを有することができる。各コアは、神経モデルの複数の神経素子を実施することができる。 (もっと読む)
海馬に基づく擬似神経システムを備えたモバイル頭脳ベースのデバイス
【課題】擬似神経システムによって制御し、統制する物理モバイルデバイスNOMADを有する頭脳ベースのデバイス(BBD)を提供する。
【解決手段】この擬似神経システムは、海馬の複雑な解剖学的構造及び生理機能と、皮質を含むその周囲の神経領域とに基づいている。BBDは、非常に多くの物体からの空間信号を時間内に統合して、未知の世界の探検を手助けするための柔軟なナビゲーション解決法を提供する。NOMADは実世界環境内をナビゲートするので、擬似神経システムの海馬は、時間的尺度でNOMADのセンサから受信されるマルチモード入力情報を組織し、この組織をナビゲーションに必要な空間的エピソード記憶の発達のために使用する。
(もっと読む)
実世界環境において使用するためのモバイル頭脳ベースデバイス
【課題】センサ及びエフェクタ(神経的に組織されたモバイル適応デバイス、又は、NOMAD)を装備したモバイルベースを含んでおり、視覚的処理、決定マーキング、報酬、運動反応に対して要求される脳の皮質及び皮質下の類似物である擬似神経システムによって導かれるモバイル頭脳ベースデバイスBBDを提供する。
【解決手段】これらの擬似皮質及び皮質下領域は、再入可能に結合され、各領域は、平均活動レベルとニューロングループの活動の関連タイミングとの両方を表現する神経ユニットを含む。この頭脳ベースデバイスBBDは、共通する視覚的特徴を有する複数のオブジェクトの中から区別することを学習し、「目標」物体に、本質的に好ましい聴覚的な合図を連合させる。再入可能な神経構造によって抑制され、行動とシナプシス可塑性とによって変調されたこれらの回路は、結果として物体の識別に成功する。
(もっと読む)
1 - 7 / 7
[ Back to top ]