
オハイオ ステート ユニバーシティ リサーチ ファウンデーションにより出願された特許
1 - 2 / 2
サインに基づくマンマシンインタラクション
【課題】人間のサイン及びジェスチャのコンピュータ視覚認識に基づくヒューマンコンピュータインタラクション方法を提供する。
【解決手段】人間の検出、人間のボディパーツ検出、手形状分析、軌道分析、向き決定、ジェスチャマッチング等を含む。形状及びジェスチャの多くの型が、コンピュータビジョンに基づく煩わしくない様式で認識される。多くのアプリケーションが、家電の遠隔制御、コンピュータ制御装置のマウスレス(及びタッチレス)操作、ゲーミング及び他方に命令を与えるための人間−ロボットコミュニケーションを含むこのサイン理解技術により実現可能となる。動的な検出ハードウェアが、ビデオレートでの深度画像のストリームを取得するために用いられ、深度画像のストリームは、情報抽出のために順次分析される。
(もっと読む)
サインに基づく人間−機械相互作用
コミュニケーションは、人間−ロボット相互作用における重要な問題である。サインは、ユーザの命令又はコマンドを提供することにより機械との相互作用に用いられる。本発明の一実施形態は、人間の検出、人間のボディパーツ検出、手形状分析、軌道分析、向き決定、ジェスチャマッチング等を含む。形状及びジェスチャの多くの型が、コンピュータビジョンに基づく煩わしくない様式で認識される。多くのアプリケーションが、家電の遠隔制御、コンピュータ制御装置のマウスレス(及びタッチレス)操作、ゲーミング及び他方に命令を与えるための人間−ロボットコミュニケーションを含むこのサイン理解技術により実現可能となる。動的な検出ハードウェアが、ビデオレートでの深度画像のストリームを取得するために用いられ、深度画像のストリームは、情報抽出のために順次分析される。 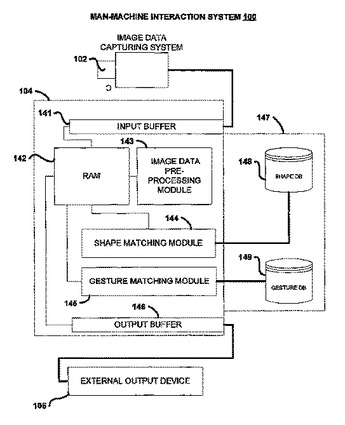 (もっと読む)
(もっと読む)
1 - 2 / 2
[ Back to top ]