
ディッケル マホ プロンテン ゲーエムベーハーにより出願された特許
1 - 10 / 16
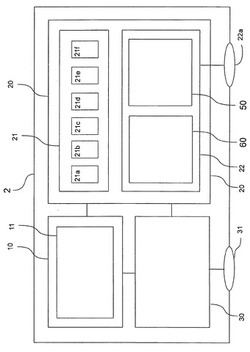
工作物を取り扱い、組み立て、または機械加工するための自動化された機械を作動させるためのデバイス
【課題】工作機械の、より直感的でフレキシブルで、効率的で、更に安全な作動または制御を可能にする。
【解決手段】作動装置20は、マニュアル操作アクションを入力するための第1入力装置21と、無接触操作アクションを入力するための第2入力装置22とを備え、無接触操作アクションを入力するための第2入力装置22は、前記オペレータの無接触アクションを検出するためのセンサシステム50と、このセンサシステム50により検出されるオペレータの無接触アクションにより、オペレータのコマンドトリガー操作アクションを検出するための検出ユニット60とを備える。
(もっと読む)
工作機械の工具取扱い装置

【課題】本発明は、技術的に簡単に構成され、小さな空間で工具交換器の十分に長い移動距離を可能とする、工作機械の工具取扱い装置を提供する。
【解決手段】本発明は、工具の移送のための移送位置(7)を有する工具マガジン(5)を有し、該移送位置と交換位置の間で移動可能な工具交換器(33)を含み、該工具交換器が回転可能な二重把持部(36)と、該工具交換器(33)が取り付けられる基礎(10)上で移動可能な支持構造(20、31)を有している、工作機械の工具取扱い装置に関する。機械上の狭い空間での速い工具交換を実現するために、支持構造は、基礎(10)上で同じ方向にスピンドル駆動装置によって変位される上方スライド(31)と下方スライド(20)を有し、単一の駆動モータ(40)が2つのスピンドル駆動装置を駆動するために設けられている。
(もっと読む)
加工機械
【課題】作動状態を監視するための加工機械の提供。
【解決手段】本発明に係る加工機械は、加工工具を交換可能に取り付けられる加工主軸及び加工主軸を駆動する電気モータが取り付けられたモータによって複数の座標軸に沿って移動可能な機械加工ユニットと、プログラム可能な制御ユニットと、加工機械の作動状態を監視する手段とを備え、少なくとも1つの作動パラメータを検出する少なくとも1つのセンサ・システムが、作動パラメータに関連する加工機械の構成部材に配置され、評価ユニットが、センサ・システム及び制御ユニットの双方に結合され、センサ・システムによって検出された測定値を処理するようになっており、光学表示装置が、操作者が直視できる範囲に設けられ、評価ユニットからのデータに基づき、加工機械の正常な作動状態、注意すべき作動状態、及び危険な作動状態を表示するようになっている。
(もっと読む)
工作機械で加工品をフライス加工することにより、歯のフランクを形成するための制御データを発生する方法および装置
【課題】歯切り後のフランク(歯面)の再加工を不要にすること
【解決手段】本発明は、発生された制御データに基づき、工作機械上でフライスカッターを連続的に通過させることにより、少なくとも5本の軸を有する数値制御式工作機械上で、特に汎用工作機械上で、加工品をフライス加工することにより、歯のフランクを形成するための制御データを発生する方法および装置であって、歯のフランクの幾何学的形状を予め定めるステップと、前記予め定められた歯のフランク上の接触パターンを定めるステップと、記予め定められた歯のフランクの幾何学的形状をを修正するためのパラメータを定めるステップと、前記特定された接触パターンエリアおよび前記定められたパラメータによって修正された歯のフランクの幾何学的形状が定められた接触パターンエリアに応じて制御データを発生するステップを備える方法および装置に関する。
(もっと読む)
工作機械において加工品をフライス加工することにより、平歯車の歯集合体のうちの歯を形成するための制御データを発生する方法および装置
【課題】平歯車の歯集合体を有する加工品の機械加工、処理または製造を更に簡略化
【解決手段】本発明は、発生された制御データに基づき、複数の機械加工経路に沿って工作機械のフライスカッターを連続的に移動させることによって少なくとも5本の軸を有する数値制御式工作機械で、特にフライス盤、汎用工作機械、マシニングセンターで、加工品をフライス加工することにより、所望する幅方向のクラウニングを有する平歯車の歯集合体のうちの歯を形成するための制御データを発生する方法および装置に関し、この方法は、平歯車の歯集合体のうちの歯の少なくとも1つの歯のフランクの幾何学的形状を提供するステップと、前記歯の前記所望する幅方向のクラウニングに従って、前記提供された歯のフランクの幾何学的形状の変更を決定するためのパラメータを決定するステップと、前記決定されたパラメータに基づき変更された歯のフランクの幾何学的形状に基づき、制御データを発生するためのステップとを備える。
(もっと読む)
冷却潤滑液の処理装置
【課題】潤滑油の効果的な浄化を可能とする冷却潤滑油の処理、及び簡単な手段で装置から取り外しできるフィルタ集合体を提供する。
【解決手段】冷却潤滑液と固体片との未処理混合液を受取るコンテナ1と、集めた固体片(屑片)をコンテナ1から運び出すためにコンテナ内に装備された無端コンベヤ6と、冷却潤滑液を固体片から分離するためにコンテナ1内に配置された少なくとも1つのろ過ユニットとを含み、ろ過ユニットが移動できるように形成され、また、コンテナ1への挿入で無端コンベヤ6の下側走行部11よりも上方に位置決めできるようになされた機械工具の冷却潤滑液および屑片の処理装置。
(もっと読む)
少なくとも5本の軸を含む工作機械で工具を制御するための制御データを発生するための方法および装置
【課題】工作機械において、工具の不連続的な回転軸の運動および工具の摩耗の増加を防止すると共に、加工品の最適な表面仕上げを可能にすること
【解決手段】ベース本体およびこのベース本体から突出する少なくとも1つのフランク部分を有する予め決定された仕上げ部品を製造するための、少なくとも5軸を含む工作機械であって、部品の幾何学的形状データによりパスデータが発生され、パスデータは、ポイントの列からなるラインに属し、共通平面内にあり、共通平面は、ベース本体に実質的に直交しており、ポイントの第1ラインのうちのポイントを通過して延びる曲線に対して工具パスが実質的に平行となるように、パスデータが発生され、ポイントの第1ラインのうちのポイントの各々において、工具の回転軸が、第1ラインのそれぞれのポイントの列の共通平面によって実質的に自ら定まるように、更にパスデータが発生される。
(もっと読む)
工作機械で工具を制御するための変換された制御データを発生するための方法および装置
【課題】工作機械においてクランプされた加工品を正確に機械加工できるようにすること
【解決手段】加工品がクランプ手段内にクランプされている場合にクランプ手段内に加工品のクランプ状況の目標とする状態を示すクランプ状況の目標状態に従って、クランプされた加工品を機械加工するために工具がどの第1工具配向でどの第1工具パスを移動すべきかを表示する制御データ決定ステップを備え、更にクランプ状況の現在の状態を検出するステップと、クランプされた状況の現在の状態とクランプされた状況の目標とする状態との間のクランプされた状況の偏差を検出するステップと、検出されたクランプされた状況の偏差に応じて、変換された制御データを発生するステップとを更に備えることを特徴とする。
(もっと読む)
加工品を機械加工するための工作機械および方法
【課題】機械加工において所定の品質が得られているかどうかを判断する。
【解決手段】同時に制御可能な少なくとも5本の軸を含む制御データによって制御される1つ以上の工具130により加工品200を機械加工するための工作機械であり、工作機械100は、第1加工品200の第1ギアの現在の幾何学的形状、特に現在の歯のフランクの幾何学的形状および/または現在の歯のギャップの幾何学的形状が、第1加工品200の第1ギアの目標とする歯のフランクの幾何学的形状および/または目標とする歯のギャップの幾何学的形状と異なるかどうかを、工作機械100上での第1加工品200の機械加工中および/またはその機械加工後に判断するようになっているテストシステムを更に備える。
(もっと読む)
工作機械内にクランプされた加工品を生成機械加工するための装置およびギアを有する加工品を製造するための方法
【課題】工作機械にクランプされた加工品を少ない誤差でフレキシブルかつ効率的に、所望するプロフィルの幾何学的形状に機械加工すること
【解決手段】本発明は、工作機械にクランプされた加工品を機械加工するための装置、方法および工作機械に関し、この装置は、ホブフライス加工により加工品上でローリング可能なプロフィル、特にギアを成形するため、前記加工品の材料を除去するためのホビング工具と、このホビング工具を支持するためのホビング工具支持手段とを備え、この装置は、特にフライスヘッドの支持手段内に、本装置を固定するようになっているフライスヘッド固定手段を備え、工作機械(200)は少なくとも5本の軸を備える。
(もっと読む)
1 - 10 / 16
[ Back to top ]