
ヴィットマン・クンストシュトッフゲレーテ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツングにより出願された特許
1 - 5 / 5
ばら積み品を乾燥するための方法
【課題】 本発明は、空気流でもって、乾燥サイロ内において、ばら積み品、特に、粒状体、粉状体、穀粒状体、薄片状体、小片状体、またはその種の他の物のような固形物、有利には、合成樹脂の粒状体を乾燥するための方法であって、その際、この乾燥サイロから流出する排気空気流、もしくは帰還空気が、乾燥剤もしくは吸着剤を内に備える、乾燥隔室、有利にはホイール形乾燥機内において乾燥され、且つ、乾燥空気流として、ばら積み品に再び供給され、および、このホイール形乾燥機内において、更に、吸着剤が再生され、且つ冷却され、その際、このホイール形乾燥機の回転可能なドラムが、少なくとも3つの円の切片に分割されており、その際、第1の円の切片の領域が、排気空気流の乾燥もしくは除湿に使用され、第2の円の切片の領域が、吸着剤の加熱に使用され、および、第3の円の切片の領域が、吸着剤の冷却に使用される様式の上記方法に関する。
【解決手段】 排気空気流5のための乾燥もしくは除湿段階14、および有利には、吸着剤の冷却が、平行に、特に連続的に、継続作動状態において経過し、且つ、吸着剤の加熱でもっての再生段階15が、間欠作動状態において実施されること、その際、ホイール形乾燥機1のドラム2が、冷却段階16、もしくは再生段階15内において停止され、且つ、冷却段階16、もしくは再生段階15の終了の後、選択可能な領域、有利には冷却領域をまわって、更に同期的に進ませられること、および、上記加熱のための領域が、少なくとも冷却のための領域と同じ大きさに構成されているか、または、この冷却のための領域よりも大きく、有利には、2倍だけ大きく構成されている。  (もっと読む)
(もっと読む)
ばら積み品を乾燥するための装置
【課題】 本発明は、ばら積み品、特に、粒状体、粉状体、穀粒状体、薄片状体、小片状体、またはその種の他の物のような固形物、有利には、合成樹脂の粒状体を乾燥するための装置に関する。空気流によって、貫通流動される乾燥サイロが設けられており、且つ、この乾燥サイロが、この乾燥サイロから流出する排気空気流、もしくは帰還空気の乾燥のために、プロセス送風機を介して、乾燥剤もしくは吸着剤を内に備える、ホイール形乾燥機と結合されており、このホイール形乾燥機が半径方向の隔室を備える回転可能なドラムを有している。このホイール形乾燥機内において、排気空気流が乾燥され、吸着剤が再生され、且つ引き続いて冷却され、および、この排気空気流が、乾燥空気流として、乾燥サイロに再び供給可能である。
【解決手段】 ホイール形乾燥機1のドラム2の個別の隔室21が、薄板から形成されており、その際、このドラム2の、半径方向で外側カバー部22および内側カバー部23に隣接する、1つの隔室21の締付け薄板24が、U字形の断面を有しており、且つ、軸線方向に、ドラム2の内側壁に沿って設けられている。上記U字形の締付け薄板24の脚部25が、外方へと傾斜されている。個別の隔室21の分離壁として設けられている分離薄板26が、2つの、互いに隣接しているU字形の締付け薄板24の、隣接する脚部25の締付け作用によって位置決めされ、且つ、隔室状に封隙する。 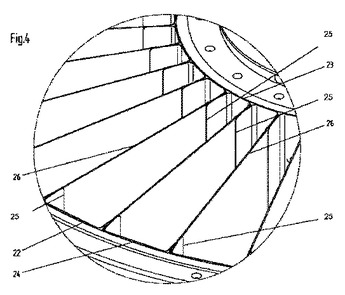 (もっと読む)
(もっと読む)
充満時間の検出方法
【課題】一面では先行技術の欠点を回避し、この種の搬送装置の合理的稼働を可能とされる方法を創作すること。
【解決手段】この発明は、ばら荷を備える少なくとも一つの貯蔵容器からの搬送装置に、充満状態センサー(12)と需要センサー(11)を備えている少なくとも一つの材料遮断機の充満する充満時間を検出する方法に関する。
開始時には、導管(3、6)が空で、材料遮断機(1)が空であり、ばら荷が貯蔵容器(4)から需要センサー(11)の反応から充満センサー(12)の反応まで搬送され、この搬送時間(TREF1)が測定されて記憶される。需要センサー(11)の新たな反応には、再び充満センサー(12)の反応まで搬送され、この搬送時間(TREF2)が材料遮断機(1)の充満のための搬送時間と一致し、測定されて記憶され、第一搬送の導管(3、6)内にばら荷が存在する。搬送時間(TREF2)が搬送時間(TREF1)から引かれて、吸込み時間と同じである吸出し時間(TLEER)を決定する。導管(3、6)が算出された吸出し時間(TLEER)により吸出される。需要センサー(11)の新たな反応には、材料遮断機(1)の充満が搬送時間(TREF2)により且つ吸出しが両方が加えた充満時間を意味する吸出し時間(TLEER)により実施される。 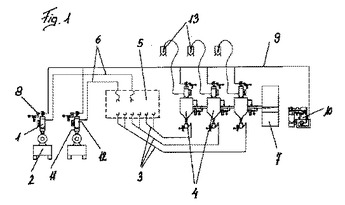 (もっと読む)
(もっと読む)
移送システム用材料分離装置
本発明は、移送システム、特に、プラスチック粒状物質を処理する機械のための材料分離装置に関する。蓋フード又は蓋(2)を備えた筐体(1)が配備されており、その筐体の側面には、材料供給接続部(3)が配置され、その上の側面には吸出接続部(4)が配置されており、有利には、筐体(1)の下方の端には、閉鎖機器(5)が配備されている。その筐体(1)内の材料供給接続部(3)と吸出接続部(4)の間には、筐体(1)の横断面に渡って延びる篩(11)が配備されている。筐体(1)又は筐体上端(9)の蓋フード又は蓋側が、平坦な切断面の形で傾斜している。篩(11)が、筐体内部の材料供給接続部(3)と吸出接続部(4)の間の領域から蓋(2)の方向に筐体上端(9)の領域にまで延びており、有利には、屋根の形で折れ曲がっている。篩(11)は、蓋(2)と接続されている。  (もっと読む)
(もっと読む)
リニア駆動装置の位置制御方法及び/又は速度制御方法
【課題】コストを抑えつつ高い精度の駆動装置の制御を達成すること。
【解決手段】リニア駆動装置の位置制御方法及び/又は速度制御方法であって、電動機1が変換装置3を介して制御ユニット4に接続されており、該電動機1の位置がセンサなし又は位置検出センサにより特定される前記位置制御方法及び/又は速度制御方法において、前記電動機1の位置信号と、制御ユニット4内に設けられ、かつリニア駆動装置の可動部材2に設けられた加速度センサ5が生成する加速度信号とを数学的に処理して速度信号を生成する。そして、該速度信号をリニア駆動装置の制御に用いる。  (もっと読む)
(もっと読む)
1 - 5 / 5
[ Back to top ]