
ケイエスアール テクノロジーズ カンパニーにより出願された特許
1 - 10 / 12
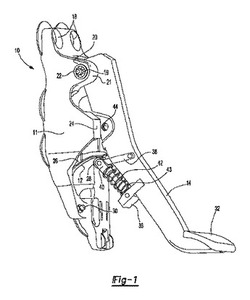
電子ブレーキシステム用のペダルアセンブリ
電気−機械式ブレーキ装置は、ブラケット(20)と、ブラケット(20)によって支持されるペダルアーム(40)とを含む。ブラケット(20)およびペダルアーム(40)の一方は、カム体(72)をもたらす。ペダルアーム(40)およびブラケット(20)の他方は、カムフォロワ(64)をもたらす。カム体(72)およびカムフォロワ(64)の一方は回転可能である。カムバイアス(86)は、回転可能な一方のカム体(72)およびカムフォロワ(64)をブラケット(20)およびペダルアーム(40)の一方に相互接続する。ペダルアーム(40)がブラケット(20)の方に移動するにつれ、カムフォロワ(64)はカム体(72)に沿って動き、カムバイアス(86)を圧縮させて純粋に機械式ブレーキシステムの感じをシミュレーションする。特定の実施例において、ブラケット(20)はカム体(72)をもたらし、他の実施例では、ペダルアーム(40)がカム体をもたらす。特定の実施例において、カム体(72)が回転するのに対して、他の実施例ではカムフォロワ(64)が回転する。 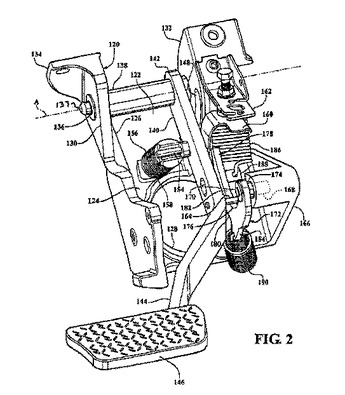 (もっと読む)
(もっと読む)
誘導位置センサ
高周波電流源によって通電される送信コイルを備えたロータリポジションセンサを提供する。第1の受信コイルは偶数のN個のループを含み、第1の受信コイルの有する隣接するループは逆方向に巻かれている。第2の受信コイルはまた、N個のループを含み、隣接するループは逆方向に巻かれている。さらに、第2の受信コイルは、第1の受信コイルから180/N度だけ角度を付けてオフセットされる。導電性材料からなる非円形カプラは、カプラ要素が第1および第2の受信コイルの少なくとも一部上に重なるように、コイルに対して回転可能に装着される。回路は、第1および第2の受信コイルからの出力信号を処理し、カプラの回転位置を表わす出力信号を生成する。 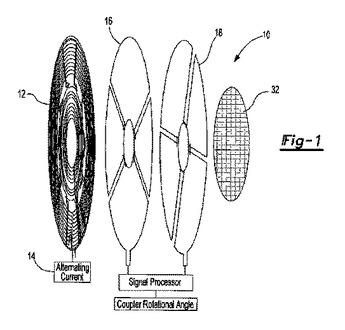 (もっと読む)
(もっと読む)
非接触式センサを有するブレーキペダルアッセンブリ
非接触式位置センサを使用し、カム面に載るばね付勢式ローラを活用して従来式ブレーキペダルの感触をシミュレートするアッセンブリが提供されている。ペダルアッセンブリは、カム面を有する細長いブレーキサポートブラケットと、ばね付勢式ローラを有するペダルアームを含んでいる。ばね付勢式ローラアッセンブリは、ペダルアームの内方面又は近傍に取り付けられているか、又はペダルアームの両面に取り付けられている。ローラアッセンブリは、ペダルアームの内側面から伸張する固定脚と、ペダルアームに枢動式に取り付けられている可動脚を含んでいる。ローラに対する付勢力を生成するように、付勢部材がサポートの上を固定脚と可動端の間に伸張している。ペダルが押し下げられると、ローラがサポートブラケットのカム面に沿って動かされ、それによって、従来式ペダルアッセンブリの「感触」が作り出される。 (もっと読む)
リニア誘導位置センサ
リニア位置センサは、電気エネルギ源によって励起されるとき電磁放射線を発生させ、かつ第1の方向に巻かれた送信器コイルを有する。受信器コイルは、送信器コイル内に含まれている。受信器コイルは、第1の方向に巻かれた第1のループと逆の方向に巻かれた第2のループとの両方を含む。結合器素子は、送信器コイルに対して第1の方向に沿って線状に移動し、これは、送信器コイルと受信器コイルとの間の誘導結合を結合器素子の線形位置の関数として変動させることによって、送信器コイルによって励起されたときの受信器コイルからの電気出力信号を変動させる。受信器コイルの第1および第2のループは、互いに第1の方向に沿って線状に配列されている。 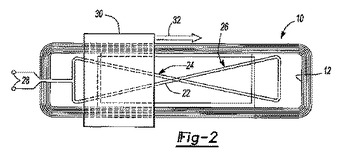 (もっと読む)
(もっと読む)
誘導位置センサ
位置センサは、交流電気エネルギ源によって励起されると電磁放射を生成する円形のトランスミッタコイルを有する。レシーバコイルは、トランスミッタコイルの部分の周りに第1の方向に巻かれる第1のループと、トランスミッタコイルにおいて径方向に対向する部分の周りに、第1の方向とは反対の第2の方向に巻かれる第2のループとを有する。さらに、レシーバコイルは、トランスミッタコイルの第1の部分の内側に、第2の方向に巻かれる第1の補償コイルを含むとともに、トランスミッタコイルの第2の部分の内側に、第1の方向に巻かれる第2の補償コイルを含む。レシーバコイルの第1および第2のループならびに第1および第2の補償コイルは、互いに直列に電気的に接続される。移動可能な結合要素が、トランスミッタコイルとレシーバコイルとの間の誘導結合を、当該結合器の位置の関数として変動し、これによりトランスミッタコイルによって励起された際に、レシーバコイルからの電気的出力信号を変動させる。 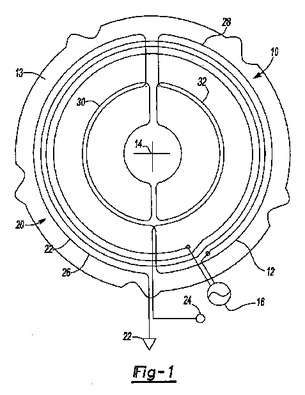 (もっと読む)
(もっと読む)
誘導式位置センサ
位置センサは、外側ループ部分および内側ループ部分の双方を有するトランスミッタコイルを有する。レシーバコイルがトランスミッタコイルのごく近傍に配置されており、レシーバコイルは、第1のループと、反対方向に巻かれた第2のループとを含む。レシーバコイルは、トランスミッタコイルとレシーバコイルとの誘導結合によってトランスミッタコイルが励起されると、電気出力信号を生成する。可動のカプラー素子は、トランスミッタコイルとレシーバコイルのループとの誘導結合を、カプラー素子の位置の関数として変化させる。 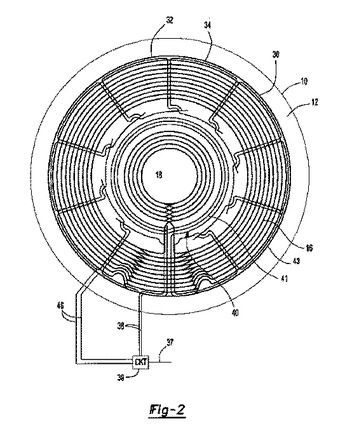 (もっと読む)
(もっと読む)
ノイズ制御が向上した小型ペダルアセンブリ
小型車両ペダルはガイドスロットがある下部アームを有する取付ブラケットを含む。取付面とガイドスロットがある上部アームとを有するスイングプレートは、スイングプレートガイドスロット内に配置されるピボットピンによって、第1の軸において取付ブラケット上部アームに旋回可能に相互接続され、スイングプレート上側端は第1の自由度を有する。電子的に制御されるペダルアームアセンブリはスイングプレートに取付けられる。駆動装置に接続されるねじ部材の一端はスイングプレートに接続され、第2の軸において取付ブラケットスロットに動作可能に接続され、スイングプレート下側端は第1の自由度より大きい第2の自由度を有する。駆動装置を駆動させることにより、ねじ部材が変位し、第1の軸および第2の軸を廻るスイングプレートの旋回可能な動きを制限する。 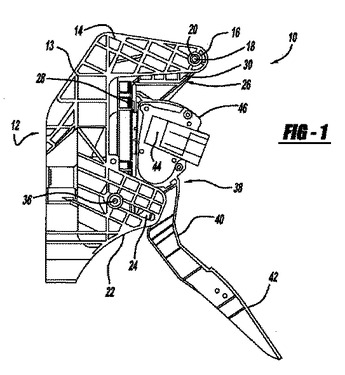 (もっと読む)
(もっと読む)
スロットル開度センサアセンブリ
ハウジング16と、ハウジング16内に回転式に取り付けられた本体22とを有するスロットル開度センサ10。位置合わせクリップ28が、本体22と調和して回転するように本体22に装着される。この位置合わせクリップ28はさらに、所定の角度位置でスロットルシャフト15の端部38を受け、本体22をスロットルシャフト15に位置合わせするように適合される。ハウジング16にはセンサ52も取り付けられ、そのセンサ52は、ハウジング16に関する本体22の回転位置を表す出力信号を生成する。 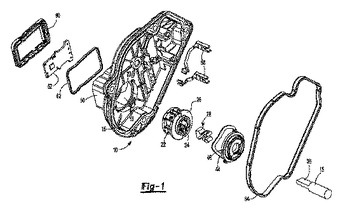 (もっと読む)
(もっと読む)
基準信号を用いる誘導位置センサ
カプラー要素の位置と関連する信号を提供する装置は、励起コイルと受信コイルを備える。装置は、受信コイルと励起コイルとの誘導結合により励起コイルが励起されると生成される受信信号を用いて、カプラー要素の位置と関連する信号を提供する動作が可能である。いくつかの例において、受信コイルは第1部分信号及び第2部分信号をそれぞれ生成する第1部分及び第2部分を有し、電子回路は、第1部分信号と第2信号とを用いて、位置非依存信号を生成する動作が可能である。レシオメトリック位置の感知用に改良された基準信号は、位置非依存信号をベースライン電圧から減算することにより提供可能である。  (もっと読む)
(もっと読む)
ステアリング角度センサ

ステアリング角度及びトルクセンサ、並びに他のタイプの回転又は線形位置センサを含むセンサを提供する。ステアリングコラムのようなシャフトの角度位置を判断するための装置は、コイルアセンブリ、コイル支持体、及びシャフトの角度位置と相関性があるカプラ角度位置を有するカプラ要素を含む。コイルアセンブリは、送信機コイル及び少なくとも1つの受信機コイルを含み、カプラ要素は、送信機コイルと少なくとも1つの受信機コイルとの間の誘導結合を変更する。信号処理回路は、コイルアセンブリからコイル信号を受け取り、受信機信号と、軸線方向変位と相関性があるが、それ以外は実質的に角度位置と無関係である基準信号とを用いて角度位置を判断する。基準信号をレシオメトリック感知に用いて、実質的に共通モード因子を排除し、かつシャフトの回転数を判断することもできる。複合角度及びトルクセンサは、トーションバーにわたるより角度を更に判断する。 (もっと読む)
1 - 10 / 12
[ Back to top ]