
リーフ株式会社により出願された特許
1 - 3 / 3
球体駆動モジュール及びそれを用いた搬送装置
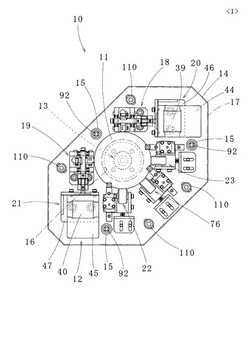
【課題】シンプルな構造を有し、短時間で搬送物の方向転換、位置決めを行う球体駆動モジュール及びそれを用いた搬送装置を提供する。
【解決手段】搬送物下面に当接して回転可能な球体11と、球体11を回転する駆動機構12と、球体11を回転可能に保持する球体保持部材13と、球体保持部材13及び駆動機構12の基台14と、支持部材15を介して基台14に取付けられ、球体保持部材13及び駆動機構12を覆い上面の開口部16から球体11の上部を露出させるカバー部材17とを有する球体駆動モジュール10であって、駆動機構12は、平面視して球体11の中心に向けて直交する方向から球体11に当接する第1、第2の駆動輪18、19と、第1、第2の駆動輪18、19の第1、第2の回転駆動源20、21と、球体11を挟んで第1、第2の駆動輪18、19と対向する第1、第2の補助受け部材22、23とを備え、球体11の表層部はゴム又は樹脂からなる。
(もっと読む)
自立式の歩行支援装置

【課題】被介助者が杖を用いた歩行方法を習得及び習熟することを効率的に補助すると共に、訓練のモチベーションも高めることが可能な自立式の歩行支援装置を提供する。
【解決手段】歩行時の支えとなる支持部材11が立設された自走台車12と、支持部材11に設けられた自走台車12の操作部13とを有し、操作部13の操作によって床面14上を自走台車12が移動する自立式の歩行支援装置10であって、自走台車12には、操作部13を操作する被介助者の踏み出し位置情報を、音声及び/又は光でそれぞれ伝える聴覚案内手段15及び/又は視覚案内手段16を備えた教示部17が設けられている。
(もっと読む)
ロボットアームの姿勢保持構造
【課題】ブレーキ機構や減速機構を備えていない関節部の姿勢を保持不能な小型駆動手段を採用しつつ、関節部の姿勢保持が可能なロボットアームの姿勢保持構造を提供する。
【解決手段】一方のアーム部16,18に対して上下方向へ回転し得るよう他方のアーム部18,20が連結された関節部24,26を備えたロボットアームにおいて、関節部24,26は、通電時には両アーム部16,18/18,20の相対位置を保持可能で、非通電時には両アーム部16,18/18,20の相対位置を保持不能な小型駆動手段34により駆動すると共に、関節部22,24,26を構成する両アーム部16,18/18,20は、駆動手段34による両アーム部16,18/18,20の姿勢変化に伴って可撓変形すると共に駆動手段34への通電停止時では当該通電停止時での姿勢を維持する可撓性部材32で連結するよう構成した。
(もっと読む)
1 - 3 / 3
[ Back to top ]