
ヴァレオ・シャルター・ウント・ゼンゾーレン・ゲーエムベーハーにより出願された特許
1 - 10 / 22
車両ドライバ支援装置およびレーダ装置操作方法
Notice: Undefined index: from_cache in /mnt/www/gzt_applicant_list.php on line 189
ビデオ画像に基づく道路特性分析、車線検出、および車線逸脱防止方法および装置
【課題】 ビデオ画像に基づいて道路特性分析および車線検出を行い、それによって車線逸脱を警告する方法および装置を提供する。
【解決手段】 この車線逸脱を警告する方法は、ビデオイメージャから、車両の前方の道路の画像を受け取るステップと、画像内に、道路上の路面標識に対応する1つ以上の路面標識を検出するステップと、次いで、検出された路面標識の外側の画像領域に対応する道路の運転しやすさの評価を決定するために、その画像領域の特性を分析するステップと、検出された路面標識に基づいて、路面標識に相対的に、車両の道路上の横方向のオフセットを検出するステップとを含んでいる。警告信号は、横方向のオフセットおよび評価の関数として生成される。
(もっと読む)
ステアリングコラム装置

【課題】ロータとステータとを連結状態と非連結状態の間で切り替えることができるステアリングコラム装置を、小さいスペースにも設置することができるようにする。
【解決手段】回転不能に固定されたステータと、ハンドルに連結することができ、ステータに対して回転しうるロータと、ロータおよびステータを連結状態または非連結状態に切り替えうる連結体とを備えるステアリングコラム装置において、ロータに連結体を収容するために、湾曲部を含む取付け孔を形成するとともに、連結体に、ハンドルと対向する操作ロッドと、ステータと対向する連結ロッドとを、互いに別部材により形成して、取付け孔内において結合し、かつ取付け孔の湾曲部に位置する連結体の部分を可撓性とする。
(もっと読む)
ビデオ画像に基づく後方走行車に対する警告方法
【課題】 ビデオ画像に基づいて、高速道路における渋滞時に、後方走行車が前方走行車に衝突又は接触することを回避する方法を提供する。
【解決手段】 高速道路における渋滞(S1)の最後尾の車両(前方走行車)に設置したビデオカメラから、後方の道路の画像を受け取るステップ(S2)と、当該画像から、前方走行車と後方走行車の衝突の危険を判断するステップ(S3)と、前記危険が存在すると判断された際にハザードランプを点滅させて、前記後方走行車の運転者に警告するステップ(S4)と、前記危険が解消された際(S5)に、前記ハザードランプを消灯させるステップ(S6)を備える。
(もっと読む)
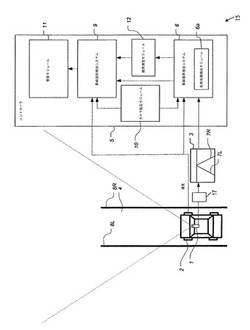
物体までの距離および/または物体の相対速度の明確な判定を行うための方法、運転者支援デバイス、および車両
本発明は、自動車(1)の中の周波数変調連続波レーダ(3、4)によって、自動車(1)に対する物体までの距離、および/または物体の相対速度の明確な判定を行うための方法に関する。周波数変調連続波レーダ(3、4)は、1回の測定サイクルの中で、所定のシーケンスの周波数変調信号パルス(23)を送信し、そのシーケンスによって、距離に対する明確エリア(RUn)、および/または相対速度に対する明確エリア(VUn)が判定される。この場合、距離に対する互いに異なる明確エリア(RUn)、および/または相対速度に対する互いに異なる明確エリア(VUn)が、連続する少なくとも2回の測定サイクルに対して規定され、距離および/または相対速度は、それぞれの場合に、各測定サイクルから得られる距離および/または相対速度に対する少なくとも1つの測定値に基づいて判定される。 (もっと読む)
車両の少なくとも半自律的な駐車を行う方法及び車両の駐車支援システム
【課題】障害物が、駐車空間に存在しても、使いやすくかつ便利な駐車工程を提供する。
【解決手段】障害物18が存在する状況で、車両13を駐車空間3に駐車させる際の駐車経路を、決定する方法で、この方法は、複数の操作26、27、29、34、38、39 として行われ、自律的操縦介入で行われるその中の少なくとも1つの操作は、前記障害物を考慮して、そのプロフィールを決定する。
(もっと読む)
レーダセンサ上の接続プラグおよびその製造方法
【課題】従来技術の問題点を解決したレーダセンサ上の接続プラグ、およびその製造方法を提供する。
【解決手段】プラグピンがプラスチック内に挿入された、レーダセンサ上の接続プラグであって、プラグピン(4)を取り囲むプラスチック(5)(11)の電気インピーダンスが低周波数域で高い値を有し、プラスチック(6)が、高周波数レーダ波の帯域のレーダ波を吸収する特性を有するように、プラスチック(5)(6)(11)が、レーダ波を吸収する顆粒を少なくとも部分的に備えている接続プラグを提案する。このために、プラグピン(4)を、レーダ波吸収顆粒を備えていないプラスチック層(5)(11)によって取り囲み、プラグピン(4)を取り囲む残りの部分を、レーダ波を吸収する顆粒を含むプラスチック(6)からなるものとする。
(もっと読む)
自動車の駐車プロセスを支援する方法および装置
【課題】 車道に交差する向きに配置されており、かつ少なくとも片側を側方境界によって画定されている駐車スペースへの自動車の駐車プロセスを、広い駐車スペースにおいても最適に支援するための方法および装置を提供する。
【解決手段】 駐車スペース(P)を測定ユニットによって測定し、自動車(1)の駐車位置(G)が、算定ユニットによって、駐車スペース(P)内に定められ、駐車位置(G)に至るまでの自動車(1)の駐車経路(B)が、算定ユニットによって決定される。非常に広い駐車スペース(P)において駐車プロセスを支援するために、少なくとも、駐車スペース(P)が、その、あらかじめ定められた最小幅(b−min)を超過しているときに、駐車位置(G)は、算定ユニットによって、駐車スペース(P)の長手方向中央軸(L)から、ある側方距離(d)だけ間隔を置いて定められる。
(もっと読む)
駐車スペースに駐車するときに車両の運転者を支援する方法
【課題】
【解決手段】車両(02,12)の運転者を、駐車スペース(03,13)に駐車するときに支援する方法であって、
−利用可能な駐車スペース(03,13)を測定し、
−駐車軌跡(04,14)を、駐車スペース(03,13)の前記測定から把握される駐車スペースの形状に基づいて、かつ前記駐車スペース(03,13)に対する車両位置に基づいて算出し、
−駐車プロセスを次に実行し、前記駐車プロセス中に、前記車両を駐車軌跡(01,11)に沿って操舵して駐車スペース(03,13)に入車させ、
かつ前記駐車スペースの形状を、前記駐車プロセス中に把握し続け、前記駐車プロセス開始前に把握される駐車スペース形状と比較し、2つの駐車スペースの形状が互いに異なる場合、生じている変位を見積もり、かつ前記駐車軌跡(01,11;05,15)を、必要に応じて補正し、及び/又は算出し直す。前記方法を実行する運転者支援装置、及び関連保存手段を有するマイクロプロセッサに指示して前記方法を実行させるコンピュータプログラム製品をも提供する。
(もっと読む)
駐車スペースへの自動車の駐車時に運転支援システムを作動させる方法
【課題】 車道脇の駐車スペースへの自動車の駐車時に、衝突事故を避けることを可能にするように運転支援システムを作動させる方法、およびこの方法を遂行するための運転支援装置、およびコンピュータプログラム製品を提供する。
【解決手段】 特定の起動速度未満において駐車スペースを探している間に、駐車が可能である駐車スペース(02)を判別し、適切な駐車スペース(02)が見出されたことを指示する情報アイテムを、自動車(01)にとって十分な長さの駐車スペース(02)を探している運転者に対して出力する。駐車スペースを探している間に、自動車(01)の速度が、起動速度を下回っているときに、自動車(01)の後方領域(03)がモニタされ、後方領域(03)に後続車両(05)が存在しているときに、自動車(01)の運転者は、突然のブレーキ操作を行うと衝突事故の発生する可能性があることを警告される。
(もっと読む)
1 - 10 / 22
[ Back to top ]