
ノースロップ グルマン リテフ ゲーエムベーハーにより出願された特許
1 - 8 / 8
アナログリセットを備える静電容量型マイクロメカニカルセンサの動作方法、および、上記静電容量型マイクロメカニカルセンサ用の回路構成

【課題】MEMSセンサの精度を大幅に改善する。
【解決手段】静電容量型マイクロメカニカルセンサは、2つの固定電極E1、E2と、外力によって変位可能な可動式の1つの中心電極E0とによって形成される、少なくとも1つの差動可変キャパシタを有しており、中心電極E0の変位測定において、中心電極E0に作用する静電復元力に相当する力の比率を補償する。センサを閉ループにおいて動作させると、その読み出し信号は、制御器PIを介してリセットクロストーク信号に影響を与え、これによって生じる容量性の復元力が中心電極の変位に抗して作用してこれを補償する。
(もっと読む)
光トランシーバおよび光ファイバジャイロ
光トランシーバ(10)は、温度制御装置(8、3)、光源(1)、光ガイドファイバ(11)、検出器(4)、光源(1)からの光をコリメートするための光学素子(5)、光ビームを光ガイドファイバ(11)にフォーカシングするための結合光学素子(15)、および、コリメートされた光ビームの一部を波長安定化部(27)に伝送しつつ、コリメートされた光ビームの他の一部を結合光学素子(15)に伝送するビームスプリッタ(6)を有する基板(18)を備えている。波長安定化部(27)は、光源(1)の波長ドリフトを検出しつつ補償する。光トランシーバ(10)は、光源(1)として超発光性ダイオードを有しており、例えば、光ファイバジャイロ(100)に一体化されていてもよい。  (もっと読む)
(もっと読む)
コリオリジャイロの動作状態のシミュレーション方法
本発明は、コリオリジャイロを特徴づける方法であって、力トランスミッタ、機械的共振子、及び、励起/リードアウト振動ピックオフを有する上記系の相互作用は、離散化された、微分方程式の連立方程式として表され、上記連立方程式の変数は、力トランスミッタによって機械的共振子に供給される力信号、および、励起/リードアウト振動ピックオフにより生成されるリードアウト信号を表し、上記連立方程式の係数は、リードアウト信号上に力信号をマッピングする一次変換に関連する情報を含んでおり、上記係数は、力信号値、及び、リードアウト信号値を異なる時に測定し、上記連立方程式にそれら力信号、および、リードアウト信号を代入することによって決定され、上記連立方程式は、上記係数に応じて数的に解かれ、上記係数は、コリオリジャイロの回転速度に悪影響を及ぼすコリオリジャイロの望まれないバイアス特性を推測するために用いられることを特徴とする。 (もっと読む)
回転速度センサー
直線加速が起こるときの回転センサーの場合における移動個別構造(100,200,300,400,500,600)に基づいて発生する測定エラーを避けるために、回転速度センサーは基板と、設計平面(x-y)上の基板に相対して移動する2つの構造(100,200,300,400,500,600)とを備え、2つの移動可能構造(100,200,300,400,500,600)は連結され、連結構造を形成し、該連結構造は設計平面(x-y)上の第1方向(x)における移動可能構造の逆位相偏向を伴う第1振動モードを励起モードとして有し、上記連結構造は、第1振動モードが励起されるとき、かつ、設計平面(x-y)に直角な、回転センサーの受感軸(z)の周りを回転しているとき、コリオリ加速度によって励起される検知モードとして第2振動モードを有し、上記連結構造は、最適な必須条件の対象となり、第2軸に平行な方向の回転速度センサーの直線加速によって励起され得るいかなる振動モードも有さないように設計されている。  (もっと読む)
(もっと読む)
コンポーネントの製造方法およびコンポーネント
本発明は、層構造内に埋設された活性構造(27)を有するコンポーネント(2)の製造方法、特に、マイクロメカニカルな、マイクロエレクトロメカニカルな、またはマイクロオプトエレクトロメカニカルなコンポーネント(2)の製造方法に関わる。活性構造(27)におけるより良好なコンタクトホール(5)を実現するために、互いに異なる各エッチング深さ(D1、D2)を有する第1および第2の各凹部(14、15)を、基板(11)および絶縁層(12)をさらに含む第1層コンビネーション(10)の被覆層(13)までエッチングすることによって、導電性の帯状ブリッジ(34)が形成される。より深い凹部(14)は、導電性の帯状ブリッジ(34)を絶縁するために用いられ、その一方で、より浅い凹部(15)は活性構造(27)のための動作空間を与え、上記動作空間は、導電性の帯状ブリッジ(34)によって架橋されている。  (もっと読む)
(もっと読む)
アナログリセットを備える静電容量型マイクロメカニカルセンサの動作方法、および、上記静電容量型マイクロメカニカルセンサ用の回路構成
本発明は、静電容量型マイクロメカニカルセンサを動作するための方法および回路構成に関する。静電容量型マイクロメカニカルセンサは、2つの固定電極(E1・E2)と、外力によって変位可能な可動式の1つの中心電極(E0)とによって形成される、少なくとも1つの差動可変キャパシタを有しており、上記中心電極の変位は測定される。本発明によれば、中心電極に作用する、静電復元力に相当する力の比率を補償する。このセンサを閉ループにおいて動作させると、その読み出し信号は、制御器を介してリセットクロストーク信号に影響を与え、これによって生じる容量性の復元力が中心電極の変位に抗して作用してこれを補償するようにする。ここには、本発明の2つの実施形態と、制御を最適化するための補足的な方法とについて記載する。  (もっと読む)
(もっと読む)
微小電気機械センサ及び微小電気機械センサの操作方法
微小電気機械センサ(30)は、少なくとも1つの移動可能な電極(29)と、個別に駆動可能であり、対応する電極信号(uo1,uo2,uu1,uu2)が供給されるための複数の電極を備え、上記移動可能な電極(29)と離間して配置されている電極構成(311−314)とを備え、上記電極信号は、力の適用、ばね定数及び上記移動可能な電極(29)の読み取り係数の、設定または変更のために静電気的に用いることが可能であり、上記電極構成(311−314)に接続され、上記力の適用に関する信号(f)、上記ばね定数に関する信号(Δω)、及び上記読み取り係数に関する信号(m)を供給され、上記力の適用、上記ばね定数、及び上記移動可能な電極の上記読み取り係数に関してもたらされる設定及び/または変更を定義する電極信号生成ユニット(32)をさらに備え、上記電極信号生成ユニット(32)は、上記力の適用に関する信号,上記ばね定数に関する信号及び上記移動可能な電極の上記読み取り係数に関する信号(f,Δω,m)に依存して各々の電極信号(uo1,uo2,uu1,uu2)を生成し、上記力の適用、上記ばね定数、及び上記共振器の上記読み取り係数が、互いに独立して特定の所望値に設定及び/または変更されるように、複数の上記電極信号(uo1,uo2,uu1,uu2)を互いに整合させる。  (もっと読む)
(もっと読む)
機械的構造物における負荷/損傷を特定する方法
機械的構造物における負荷、および/または、該機械的構造物における負荷に起因する該機械的構造物における損傷または状態を特定する方法において、上記機械的構造物における負荷/損傷によって生じた、上記機械的構造物の一部の回転を、該構造物の部分に機械的に強固に接続されている光ファイバ回転センサによって計測すると共に、計測した回転から、上記機械的構造物における負荷/損傷/状態を推測する。 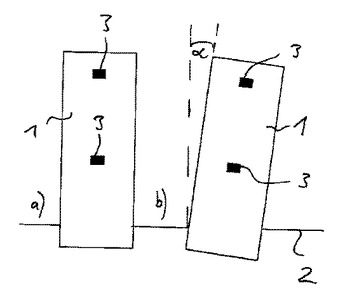 (もっと読む)
(もっと読む)
1 - 8 / 8
[ Back to top ]