
ミラエボ カンパニー リミテッドにより出願された特許
1 - 1 / 1
半導体生産ラインでの自動交替式副産物捕集装置及びその制御方法
本発明は、半導体生産ラインでの自動交替式副産物捕集装置及びその制御方法に関し、特に、公知の副産物捕集装置を構成するにおいて、垂直軸の周囲に一定角度をおいて固定設置された状態でサーボモータの駆動方向に応じて上プレート及び下プレート間で左右に回動し、いずれか一個が副産物を捕集して残りは反復的に清掃を行う数個のトラップユニットと、中央部は前記トラップユニットが固定された垂直軸が貫通する形態で軸支されて、前記上蓋体及び下蓋体と一定間隔を維持する形態で設置され前記ケースの上部及び下部からトラップユニット等の上開口部及び下開口部に接触され各々のトラップユニットに副産物流入口及び副産物排出口と洗浄水供給口及び洗浄水排出口、乾燥気体供給口及び乾燥気体排気口を選択的に連結させる上プレート及び下プレートと、平常時には伸長により前記上プレート及び下プレートとユニット等との間で気密を維持させて、トラップユニット等の交替のために一定方向に回動させる際には、垂直になりトラップユニット等を円滑に回動させるトラップとプレート連結及び分離手段と、前記垂直軸の低端部に軸が連結された状態で下プレートの底面に固定設置され制御部の出力信号に応じて正、逆方向に回動し前記トラップユニット等を一定角度範囲内で回転させるサーボモータと、制御プログラムを通じて前記サーボモータとトラップとプレートの連結及び分離手段及び各種バルブの駆動を制御する制御部とから構成される。 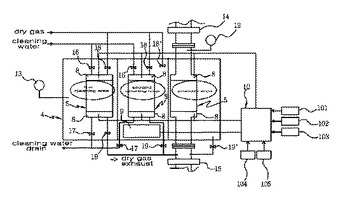 (もっと読む)
(もっと読む)
1 - 1 / 1
[ Back to top ]