
コロウエア・インコーポレイテツドにより出願された特許
1 - 1 / 1
多用途ロボット制御システム
【課題】商業標準のコンピュータシステムを利用し、異なるロボットに対応できるロボット制御システムを提供すること。
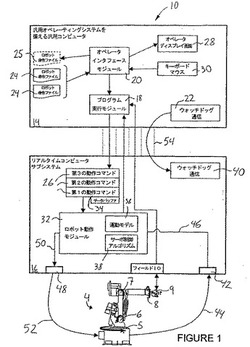
【解決手段】改良型の多用途ロボット制御システム10は、汎用オペレーティングシステムを有する汎用コンピュータ14を備える。この汎用コンピュータ14は、ロボット命令24のプログラム処理を選択的に開始および停止し、複数のロボット動作コマンド26を生成するプログラム実行モジュール18を含む。リアルタイムコンピュータサブシステムは、動作コマンドデータバッファ34と、動作を順次処理しロボットの機械ジョイントに必要な位置を計算するデータバッファ34にリンクされたロボット動作モジュール32と、動作モジュール32とソフトウェア的に通信する、ロボットのジョイント位置フィードバック信号44/46から必要なアクチュエータ活動化信号50/52を繰り返し計算する動的な制御アルゴリズム38とを含む。
(もっと読む)
1 - 1 / 1
[ Back to top ]