
得▲勝▼科學模型股▲分▼有限公司により出願された特許
1 - 1 / 1
遠隔操作のオートバイ模型
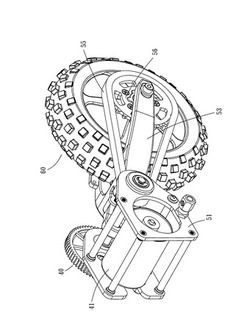
【課題】高い安定性および操縦性を得る遠隔操作のオートバイ模型を提供する。
【解決手段】遠隔操作のオートバイ模型は、車体と、車体の前部および後部にそれぞれ配置された前輪15および後輪60と、動力出力装置40とを備える。後輪60は、固定シャフトと、ホイールリムセットと、ホイール本体と、ギヤホイールおよび複数の遊星ギヤを有する遊星ギヤセットと、ギヤホイールを単一方向で回転させる一方向回転部材と、遊星ギヤに接続したクランチセットと、クランチセットを囲むように配置されたフライホイールセットとを有する。
(もっと読む)
1 - 1 / 1
[ Back to top ]