
Bi2−Vision株式会社により出願された特許
1 - 2 / 2
3D映像撮影制御システム、3D映像撮影制御方法、およびプログラム
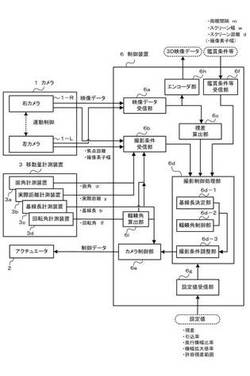
【課題】 撮影条件および鑑賞条件を総合的に考慮し、好適な3D効果を得るため、または安全性を維持するために、一対の撮像装置の位置および方向を制御する3D映像撮影制御システムを提供する。
【解決手段】 3D撮影・放送モデルおよび3D被写体モデルを統合した統合モデルに基づいて、一対の撮像装置の基線長と輻輳角を制御する。基線長決定部6d−1は、統合モデル式1で表わされる関係(撮像装置の基線長と人間両眼の基線長との比率が、引込率に比例する関係)に基づいて基線長を決定し、カメラ制御部6eは、一対の撮像装置が、決定された基線長になるよう、当該一対の撮像装置の位置を移動させる。また、輻輳角制御部2d−2は、統合モデル式2の関係(引込率と撮像装置の画角との掛け算が定数になる関係)に基づいて求められた引込率によって輻輳角を制御し、基線長決定部6d−1は、当該引込率と統合モデル式1に基づいて基線長を決定する。
(もっと読む)
ステレオ撮像装置の制御システム

【課題】一対の撮像部の相対位置関係が分からなくても立体視が可能なステレオ画像を得ることが可能なステレオ撮像装置の制御システムを提供する。
【解決手段】ステレオ撮像装置の制御システムは、一対の撮像部10と誤差算出部20と制御部30とからなる。一対の撮像部10は、ヨー、ピッチ、ロール及びズーム倍率が少なくとも制御可能なデジタル的又はアナログ的な自由度を持ち、撮像素子により連続画像を撮像可能なものである。誤差算出部20は、一対の撮像部により撮像される各画像を用いて、各撮像部の所定の標準輻輳モデルとの差異から各撮像部の回転誤差及びズーム誤差を算出する。制御部30は、誤差算出部により算出される回転誤差及びズーム誤差を用いて、撮像部の回転角及びズーム比率を制御する。
(もっと読む)
1 - 2 / 2
[ Back to top ]