
藤原産業株式会社により出願された特許
1 - 1 / 1
吊り下げ型作業ロボット、及び、吊り下げ型作業ロボットシステム
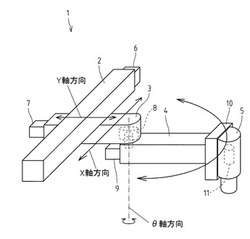
【課題】回動するアームの先端部にハンドリング装置を備える作業ロボットにおいて、ハンドリング装置における有効作業エリアと可動エリアの同一化を図ることで、作業ロボットの設置スペースの狭小化を実現するとともに、特に、連続的に搬送されるワークについて作業を行う場合において、工程設計の自由度の高い新規な構成を提案する。
【解決手段】水平面内において互いに直行するX軸方向、Y軸方向に移動可能に設けられる第一アーム3と、第一アーム3に対し水平面内においてθ軸方向に回動可能に設けられる第二アーム4と、を有し、前記第二アーム4の先端部にハンドリング装置5が設けられ得る、作業ロボット1とする。
(もっと読む)
1 - 1 / 1
[ Back to top ]