
株式会社PCSジャパンにより出願された特許
1 - 1 / 1
精密鋳造用ハンガーコンベアの制御方法および制御装置
【課題】ロボットの待機時間の縮小。
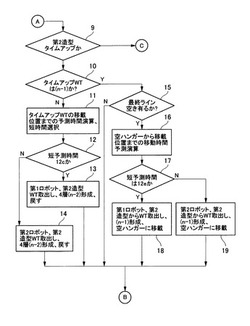
【解決手段】コンベアは、温湿度が調節された乾燥室内に設置される最終ライン用コンベアと、その前段側に配置され第2造型ライン用コンベアとを有し、双方の移動方向を正逆転可能に構成している。最終ライン用コンベア、および、造型ライン用コンベアから、ロボットが次の耐火物層を形成するためにタイムアップしたワックスツリーWTを移載位置で取出す際に、ワックスツリーWTが現在の移動方向を継続した時と、移動方向を逆転した時の、移載位置までに到達する時間を双方で予測演算し、予測演算のうちより短い時間の移動方向を選択して、選択された移動方向にワックスツリーWTを移動させる。
(もっと読む)
1 - 1 / 1
[ Back to top ]