
ウー−ブロックス アクチェンゲゼルシャフトにより出願された特許
1 - 2 / 2
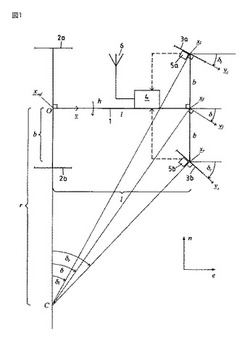
推測航法を使用して車両の位置及び方位を追跡する方法並びにその方法を実行する追跡装置
【課題】本発明の目的は、請求項1に記載の前提部に従う車両の位置及び方位を記録する方法の精度の改良を提供することである。
【解決手段】前輪(3a)及び(3b)の速度に基づく推測航法を使用して車両の位置(xref)及び方位(H)を追跡する方法であって、前輪(3a)及び(3b)の速度v及び方位変化hから演算される近似的なかじ取り角δapp及び正確なかじ取り角δexを演算し、正確なかじ取り角δexからの逸脱が小さい場合には簡単な公式で算出される近似的なかじ取り角δappを使用し、逸脱が大きい場合には正確なかじ取り角δexを使用して、車両の位置(xref)及び方位(H)を追跡する方法。
(もっと読む)
モバイルデバイスの位置の決定方法

【課題】衛星信号から週番号を抽出する必要なく、モバイルデバイスの位置を決定する。
【解決手段】前記システム時刻に依存する前記衛星の軌道を仮定して、衛星から受信する信号からモバイルデバイスの位置を規定する一連のデバイスパラメータを決定する方法であって、複数の週番号候補の1つを有するシステム時刻によって、それぞれ実行され、正当な週番号を複数の週番号候補の中から選択し、決定された一連のデバイスパラメータとして指定される正当な週番号に基づいて前記システムの式を解き、ここで、正当な週番号の選択は、解法アルゴリズムのアプリケーションが解を生じなかった少なくともいくつかの週番号を削除することによって、実行され、残りのいずれかの週番号に偏差値を割り当てて、偏差値に従って、残りの週番号の中から正当な週番号を選択する、ことを特徴とする方法。
(もっと読む)
1 - 2 / 2
[ Back to top ]