
クロッシング オートメーション インコーポレイテッドにより出願された特許
1 - 5 / 5
読取り距離を拡張したRFIDシステム
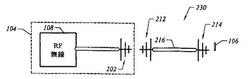
【課題】本発明は、一般的には、RFIDアンテナが、コンテナ上に取付けられたRFIDタグから情報を入手することを可能にする装置に関する。
【解決手段】本装置は、アンテナが発生したRF場を、RFIDタグの近くの位置に再現する。一実施の形態では、本装置は、ピックアップデバイスと、ピックアップデバイスに電気的に結合された再現デバイスとを具備する。別の実施の形態では、本装置は、アンテナとRFIDタグとの間を走るRF場のための磁路を作る少なくとも1つの磁気ロッドを具備する。別の実施の形態では、本装置は、ピックアップアンテナと再現アンテナとを具備し、再現アンテナは、該再現アンテナからRFIDタグの近くにRF信号を伝送するようになっている。
(もっと読む)
加工物の並列加工装置

【課題】処理時間を改善するために加工物の並列加工を行うことができる加工物取扱いロボットを提供する。
【解決手段】本発明は、複数の加工物を同時に支持することができる加工物トランスファロボットに関する。本発明による加工物トランスファロボット(100)は、ベース(102)と、ベースに関して回転可能な第1リンク(104)と、第1リンクに関して回転可能な第2リンク(106)と、第2リンクに関して回転可能なエンドエフェクター(108)を有する。エンドエフェクターは、複数の加工物のうちの第1加工物を支持することができる第1パドル(250)と、複数の加工物のうちの第2加工物を支持することができる第2パドル(252)を含む。第1パドルは、前記第2パドルに対して回転可能である。
(もっと読む)
緩衝機能を備えたエッジグリップアライナ
【課題】本発明は、緩衝(バッファリング)機能を備えたエッジアライナ(100)及びアライナによるウェーハの処理量を増大させる方法に関する。
【解決手段】本発明は、一実施形態によれば、第1のバッファアーム(106a)、第2のバッファアーム(106b)及びチャックアーム(104)を有する。加工物をチャックアーム(104)で支持した状態で位置合わせすることができる。加工物をいったん位置合わせすると、チャックアーム(104)は、この第1の加工物をバッファアーム(106a,106b)に移送して別の第2の加工物をチャックアーム(104)上に位置合わせできるようにする。第2の加工物を位置合わせしている間、エンドエフェクタは、第1の加工物をバッファアーム(106a,106b)から取り去って移送し、別の加工物を回収してチャックアーム(104)上に配置する。
(もっと読む)
基板を格納するための基板容器
【課題】半導体ウェハ又は基板を支持するための新規な装置を提供する。
【解決手段】基板容器は、基板を包囲するハウジングを備え、ハウジングはハウジングの包囲体の中にアクセスするための容器ドアを有する。ハウジングの中に配置された支持構造体は前記包囲体の中に延びる複数のタインを有する。タインは外縁を有する。複数のタインは水平方向に配置される。基板の張り出し部分はタインの外縁を越えて延び、基板に係合するアクセス領域を形成する。タインは基板を支持するための支持パッドを含む。タインのうちの1つの支持パッドのうちの1つは前記アクセス領域のうちの一方の側に配置され、タインのうちの1つの支持パッドのうちの他の1つは前記アクセス領域のうちの他方の側に配置される。
(もっと読む)
基板用容器貯蔵システム
本発明は、貯蔵システム及び貯蔵システムの作動方法に関する。貯蔵システムは、処理すべき基板を取扱うために用いられるツールの高さよりも高い位置に位置決めされた貯蔵システム組立体を有する。貯蔵システムは、基板用の1つ又は2つ以上の容器を局所的に貯蔵する。貯蔵システム組立体は、複数の貯蔵棚を含み、複数の貯蔵棚の各々は、容器を支持する棚特徴部を備えた棚プレートを有する。複数の貯蔵棚の各々は、チェーンに結合されて水平方向移動可能であり、レールに結合されて1つ又は2つ以上の位置まで案内される。モータが、チェーンを移動させる駆動スプロケットに結合され、複数の貯蔵棚の各々が、レールに沿って1つ又は2つ以上の位置まで一緒に移動する。レールは、直線状の少なくとも幾つかの直線部分と、幾つかの非直線部分を有し、直線部分及び非直線部分は、ループをなして配置される。 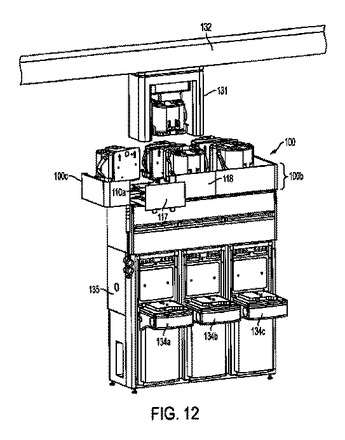 (もっと読む)
(もっと読む)
1 - 5 / 5
[ Back to top ]