
オヴェスコ エンドスコピー アーゲーにより出願された特許
1 - 6 / 6
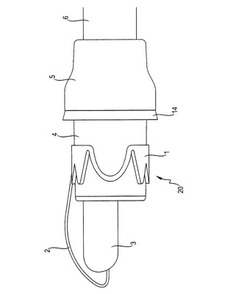
植込み装置
【課題】内視鏡キャップを有している内視鏡型植込み器具を提供する。
【解決手段】内視鏡キャップ20は、内視鏡キャップの拡張スリーブ4に嵌め付けられる、組織クリップ1のための保持および引抜き手段を備える。内視鏡キャップは、拡張スリーブの前端で開口しており、ワーキングチャネルを形成する、または器具のワーキングチャネルとは別の内視鏡チャネルの中に移動可能に入れられており、または入れられるように構成されており、内視鏡キャップの径方向に内側の面で、手動で作動される引抜き糸を有している。内視鏡型植込み器具は、手動で組織を把持し、内視鏡キャップの内部に引き込むように、ワーキングチャネル内に移動可能に挿入された組織把持手段をさらに備えている。拡張スリーブの内部に一体に配置されたクランプ手段が設けられている。クランプ手段は、糸、帯またはストリング2を介して組織クリップに接続されたカプセル型機器3を保持する。
(もっと読む)
磁気エンドエフェクタならびにその案内および位置決め装置

【課題】体内物体のための磁気案内装置(ロボット)を提供する。
【解決手段】案内装置100は、モータ駆動式の位置決め装置102を備えている。位置決め装置は、位置決め装置の接続インターフェースの並進運動のために作動する最大3自由度を含んでいる。接続インターフェースには、磁気エンドエフェクタ104が接続され、または接続可能である。磁気エンドエフェクタは磁場発生器の回転運動のために作動する最大2自由度を含んでいる。本発明によれば、磁気エンドエフェクタの2自由度の少なくとも一方が、エンドエフェクタ筐体内に収容されている。
(もっと読む)
切開装置
【課題】組織切開部を縫合するための生体組織用クリップに用いられ、組織、例えば、胃壁または結腸の最小侵襲(固体壁)切除のための切開装置を提供する。
【解決手段】シャフト型挿入手段2の遠位端部に固定または形成され、ばねの力によってバイアスされている生体組織用クリップ4がキャップ1の遠位前方縁部の上で開放/引出装置によって取り外し可能に取り付けられている拡張スリーブ3を有し、シャフト型挿入手段に用いるカップ状キャップを含む切開装置が開示される。前記拡張スリーブの内部に、前記キャップの遠位前方縁部から予め決められた軸方向距離において前記拡張スリーブの内壁に保持される切開器具33が配置される。
(もっと読む)
生体組織用クリップをセッティングするための医療機器
【課題】生体組織用クリップまたは組織クリートを内側の臓器壁(結腸壁)の括約筋の近くで容易かつ安全にセッティングできる医療機器、望ましくは生体組織用クリップをセッティングするための直腸医療器具を提供する。
【解決手段】耐屈曲性管状シャフトの近位端部に取付られたハンドル部40と、耐屈曲性管状シャフトの遠位端部に固定又は形成されたキャップと、キャップにばね力によって弾性結合され、開放/引出手段によってキャップから引出されるように構成された生体組織用クリップ4と、を含む直腸医療器具。管状シャフトの遠位端部がキャップの直前領域で傾斜され、キャップ自体が予め決められた固定角度に傾斜されて、キャップによって規定されるクリップの引出方向が管状シャフトの軸に対し所定の角度に規定される。
(もっと読む)
医療用把持装置
本発明は内視鏡キャップ(1)の拡張スリーブ(3)上に配置される組織クリップ(4)のための保持・引出装置を有する内視鏡キャップに関する。内視鏡キャップは、拡張スリーブ(3)の先端部から開放され、両側にキャップ壁を開放させるスリットを形成する前方溝(7)と、軸方向前方のキャップ部から前方溝(7)を半径方向に横断して前記内視鏡キャップ(1)の半径方向の内側で作動するように内視鏡チャネルに移動可能に導入される引出用細線又はウェブ(11)を含む。 (もっと読む)
内視鏡キャップ
本願は、前端部(13)及び後端部(14)を有するフレキシブルシャフト(2)と、少なくとも1つのウェブ部材を含むウェブ(5)を有する医療用把持装置に関するものであり、ウェブ(4)はシャフト(2)の前端部(3)に付着される。医療用把持装置は、ウェブ(4)上にヒンジが形成される少なくとも2つのブランチ(5、6)と、少なくとも部分的にシャフト(2)に配列され、部分的にフレキシブルな少なくとも2つの制御メカニズム(7、151、155、8、152、156)と、をさらに有する。それぞれのブランチ(5、6)はそれぞれの制御メカニズム(7、151、155、8、152、156)によって、ウェブ(4)に対し個別的に移動することができる。さらに、医療用把持装置は、フレキシブルシャフト(2)の後端部(14)にグリップ(150)が設けられ、該グリップを介在して医療用把持装置(1)を操作することができる。 (もっと読む)
1 - 6 / 6
[ Back to top ]