
ジーエム・グローバル・テクノロジー・オペレーションズ・エルエルシーにより出願された特許
1 - 10 / 14
ロボット制御インターフェイスの動的最適化のための方法
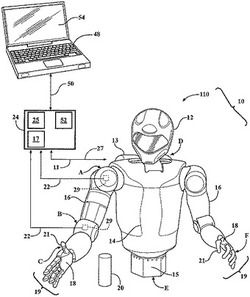
【課題】コントローラ内にデータを入力し、かつ/またはロボットシステムを制御するための制御インターフェイスを、人間−機械インターフェイスデバイス上に表示すること。
【解決手段】表示される制御インターフェイスの特定の構成は、実施される作業、ロボットシステムの性能、人間−機械インターフェイスデバイスの性能、およびユーザの専門知識のレベルに基づく。制御インターフェイスの特定の構成は、上記の基準に基づいて、ユーザとロボットシステムの間の相互作用を最適化するように設計される。
(もっと読む)
シリアルロボットのための低ストローク作動

【課題】遠位関節をより小さいストロークで作動させ、より小さいアクチュエータおよび外装設計の使用を可能にするシリアルロボットを提供すること。
【解決手段】シリアルロボットが、基部と、第1および第2の体節と、基部を第1の体節に繋げる近位関節と、遠位関節とを含む。体節を繋げる遠位関節は、近位関節に対して直列に配列されて遠位にある。ロボットは、第1および第2のアクチュエータを含む。第1の腱が、第1のアクチュエータから近位関節まで延び、第1のアクチュエータによって選択的に可動である。第2の腱が、第2のアクチュエータから遠位関節まで延び、第2のアクチュエータによって選択的に可動である。ロボットは、入力された力が第1および/または第2のアクチュエータによって近位関節および/または遠位関節に加えられると、遠位関節の回転を支援する、少なくとも1つの歯車要素を有する伝達装置を含む。また、上記のロボットを有するロボット手が開示され、胴、腕、および上記の手を有するロボットシステムも開示される。
(もっと読む)
シリアルロボットのための迅速な把持接触計算
【課題】ロボットフィンガに要求される把持接触情報を迅速に計算するシステムを提供する。
【解決手段】このロボットは、命令された把持姿勢に応答して、三次元(3D)物体を把持することができる。コントローラは、入力情報を受け取る。入力情報は、命令される把持姿勢、ロボットの運動学を記述する情報の第1セット、把持される物体の位置を記述する情報の第2セットを含む。また、コントローラは、命令された把持姿勢を達成するために、シリアルロボットに必要とされる、二次元(2D)面において、シリアルロボットと3D物体の表面との間の接触ポイントのセットを計算する。2D面において、接触ポイントのセットを用いて、リンクのペアの間の必要とされるジョイント角度が計算される。必要とされるジョイント角度を用いてシリアルロボットの運動に関する制御動作が実行される。
(もっと読む)
ステージクラス化を用いた器用なロボットの実行シーケンスを制御するための方法およびシステム
【課題】ステージクラス化を用いた器用なロボットの実行シーケンスを制御する。
【解決手段】ロボットは、複数のロボットジョイントと、ジョイントを運動させるアクチュエータと、ジョイントの特性を測定し、センサ信号として特性を伝達するセンサと、を有する。コントローラは、センサ信号を受け取り、メモリからの命令を実行し、状態クラス化モジュールを介してセンサ信号を識別できるクラスにクラス化し、クラスを用いてロボットのシステム状態を監視し、システム状態に基づいて、代替作業タスクの実行においてロボットを制御するように構成される。上述のシステム内のロボットを制御する方法は、コントローラから信号を受け取ること、状態クラス化モジュールを用いて信号をクラス化すること、クラスを用いてロボットの現在のシステム状態を監視すること、現在のシステム状態に基づいて代替作業タスクの実行においてロボットを制御すること、を含む。
(もっと読む)
通信システムおよび方法
【課題】帯域幅が制限されるネットワーク通信のために最適化される通信システムおよびプロトコルを提供すること。
【解決手段】高遅延、低帯域幅ネットワークを通じて通信するための通信システムは、ローカルシステムからデータの集合を受信するように構成される通信プロセッサ、および通信プロセッサと通信する送受信機を含む。送受信機は、複数の通信パラメータにしたがって、ネットワークを通じてデータを送受信するように構成される。通信プロセッサは、データの集合を複数のデータストリームに分割し、個々のデータストリームの重要性を反映する優先度のレベルを、個々のデータストリームのそれぞれに割り当て、少なくとも1つのデータストリームの優先度にしたがって、複数のデータストリームのうちの少なくとも1つの通信パラメータを変更するように構成される。
(もっと読む)
車両パネルアセンブリ及び該車両パネルアセンブリの連結方法
【課題】客室の外から客室内に伝わる騒音の量を制限、最小化又は低減するための構造を提供する。
【解決手段】ダッシュパネルなどの騒音を減衰させる車両パネルアセンブリが一以上の溶接継手によって構造部材に連結される。前記車両パネルアセンブリは、メインパネル部材と、騒音減衰パッチと、前記メインパネル部材と前記騒音減衰パッチとの間に配置された騒音減衰接着剤層と、を有する。前記騒音減衰パッチは、前記メインパネル部材の音響的活動領域の少なくとも一部を覆う。車両パネルアセンブリを構造部材に連結する溶接継手は、前記騒音減衰パッチ及び/又は騒音減衰接着剤層内に形成された溶接用開口部に配置されることが好ましく、これにより、追加の排気装置を必要とし溶接継手の品質に影響を及ぼしかねない溶接過程とは異なり、溶接過程中に接着剤を融解及び蒸発させることなく溶接継手を形成することができる。
(もっと読む)
ロボット駆動テンドンに張力を付与するためのシステムおよび方法
【課題】ワイア駆動において、高張力を少ない電力で実現すること。
【解決手段】テンドン張力付与システムは、近位端および遠位端を備えるテンドンと、アクチュエータと、モーターコントローラとを含む。アクチュエータは、ドライブスクリューおよびモーターを含むことができ、また、テンドンの近位端に連結され、電流に応答してテンドンに張力を付与するように構成される。モーターコントローラは、アクチュエータに電気的に連結され、テンドンにストール張力が達成されるまで、第1の大きさを備える電流をアクチュエータに提供するように構成される。また、モーターコントローラは、ストール張力の達成に続いてアクチュエータにパルス電流を提供するように構成される。パルス電流の大きさは、第1の大きさよりも大きい。モーターコントローラはさらに、パルス電流の終了に続いて、モーターを安定状態保持電流に戻すように構成される。
(もっと読む)
DYまたはTBを用いてND−FE−B焼結磁石を作製する方法
【課題】DYまたはTBを用いてND−FE−B焼結永久磁石を作製する方法および永久磁石を提供すること。
【解決手段】永久磁石を作製する方法が記載されている。一実施形態では、本方法は、所望の組成を有する第1の合金粉末を準備するステップであり、合金粉末はネオジム、鉄およびホウ素を含有する、準備するステップと、第1の合金粉末が、ジスプロシウム、テルビウムまたは両方の容積濃度を超過しているジスプロシウム、テルビウムまたは両方の表面濃度を有するように、ジスプロシウム、ジスプロシウム合金、テルビウムまたはテルビウム合金で第1の合金粉末を被覆するステップと、粉末冶金法を用いて、被覆された合金粉末から永久磁石を形成するステップであり、永久磁石はジスプロシウム、テルビウムまたは両方の非均一分布をその中に有する、形成するステップとを含む。また、永久磁石が記載されている。
(もっと読む)
自動車リチウムイオン電池システムにおける回転式高電圧接触器用の2重双極性磁界
【課題】自動車の電池システムの継電器および関連したスイッチを動作させるための装置および方法を提供すること。
【解決手段】磁界を、磁界を生成している磁石の間に配置された接触板を流れる電流の方向とそろえることにより、生成されるローレンツ力が、継電器を開くシーケンスを通じてアーク消滅を促進する一方で、同時に、ローレンツ力が、ソレノイドまたは他のスイッチを作動させる機構の動作を妨害する傾向を低減するように用いられ得る。接触板と電流搬送端子の間の接触を確立するために、回転ベースの機構を使用することにより、継電器が意図せず開く可能性が低減される。このような装置および方法は、ハイブリッドエンジン車両および電動車両とともに使用され得る。
(もっと読む)
自動車リチウムイオン電池システムにおける直線状高電圧接触器用の2重双極性磁界
【課題】自動車の電池システムの継電器および関連したスイッチを動作させるための装置および方法を提供すること。
【解決手段】2重双極性磁界を継電器の切換え機構の接触器部分と隣接して生じさせることにより、アーク消滅を促進するのに用いられる磁界が移動され、その結果として、磁界の副産物として形成するローレンツ力が低減する。このような構成は、同時にアーク消滅能力を維持して短絡に耐える能力を改善する一方で、ローレンツ力がソレノイドまたは他のスイッチ作動機構の動作を妨害する傾向を低減する潜在能力を有する。このような装置および方法は、ハイブリッドエンジン車両および電動車両とともに使用され得る。
(もっと読む)
1 - 10 / 14
[ Back to top ]