
コジマ技研工業有限会社により出願された特許
1 - 2 / 2
串刺し装置
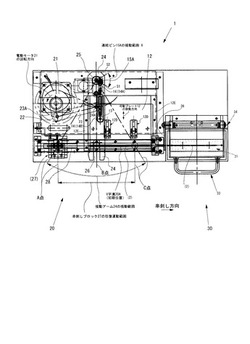
【課題】 面倒で熟練の要する串刺し作業を自動的に安産かつ信頼性高く行うことができ、作業者への負担を軽減することができる串刺し装置を提供する。
【解決手段】 串刺し装置1の串刺し機構20が、電動モータ21の回転を串2に側方から作用する可動要素12の往復運動に変換する機構と、電動モータ21の回転を揺動アーム24の揺動運動に変換すると共に、揺動アーム24の揺動運動を串2の後端を軸方向に押し出す押出要素27の往復運動に変換する機構と、を含んで構成され、串収容部10内の串2を1本ずつ可動要素12の往復運動を利用して順に取り出すと共に、この串2の後端を、押出要素27の往復運動を利用して押し出すことにより、串刺し部30において串刺し処理を行う。可動要素12の往復運動に対して所定以上の負荷が生じたときに、可動要素12に電動モータの駆動力を伝達させないようにした駆動力吸収機構が備えられる。
(もっと読む)
搬送装置と処理装置との間の位置合わせ機構

【課題】 簡単かつ低コストな構成でありながら、処理装置と搬送装置の位置合わせを容易かつ正確に行うことができるようにして、作業能率を大幅に改善することができる搬送装置と処理装置との間の位置合わせ機構を提供することを目的とする。
【解決手段】 本発明は、環状連続体110の回転により被搬送物を搬送する搬送装置100と、搬送装置100により搬送される被搬送物に対して所定の処理を施す処理装置200と、の間の位置合わせ機構であって、搬送装置100を、環状連続体110及び駆動軸131を支持するフレーム101と、前記フレーム101を分離可能に支持する支持台150と、を含んで構成し、駆動軸131と、出力軸220と、の芯合わせを行った後、駆動軸131を支持するフレーム101と、支持台150と、の間の高さ調整を行うことを特徴とする。
(もっと読む)
1 - 2 / 2
[ Back to top ]