
トヨタ モーター ヨーロッパ ナームロゼ フェンノートシャップ/ソシエテ アノニムにより出願された特許
1 - 2 / 2
乗物又は交通の制御方法及びシステム
本発明は、乗物又は交通制御方法と、乗物又は交通制御システムに関する。この乗物又は交通制御方法は、(a)第1の交通参加者の現在及び/又は未来の挙動と、第1の交通参加者とは異なる第2の交通参加者の現在及び/又は未来の挙動とをそれぞれに推定する段階と、(b)第1の交通参加者によってとられる軌道、及び/又は、第2の交通参加者によってとられる軌道を推定する段階と、(c)第2の交通参加者に対する前記第1の交通参加者の衝突のリスク評価のために適合化されている情報を計算することによって、第2の交通参加者に対する第1の交通参加者の衝突のリスクを判定する段階と、(d)段階(a)、段階(b)、及び/又は、段階(c)の後に提供される情報に基づいて第1の交通参加者の挙動を制御する段階とを含む。このようにして、未来の特定のタイムホライズン内において乗物又は交通参加者が衝突する蓋然性を示す確率値が求められる。  (もっと読む)
(もっと読む)
パルス光による光学式距離計
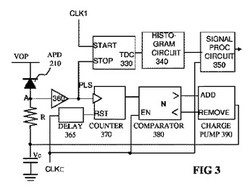
飛行時間測定に基づいた光学式距離計は、オブジェクト(70)に向ってパルス光を照射し、オブジェクトからの反射光を受信し、受信器はフォトンカウントモードで動作して検出されたフォトンに対してパルスを生成する。受信器上でフォトン検出の可変確率が存在し、且つ、コントローラ(370、380、390;365、470、475、380、390;570、580、590、390)は光レベルに基づいて、受信器のフォトン検出確率を制御する。光レベルに基づいて検出確率を制御することによって、光学部品を使用する経費を伴うことなく、受信器は増加したダイナミックレンジを有する。これは、検出確率が制御される間、受信器がフォトンカウントモードにあるので、非常に弱い信号を検出する間であっても適用することができる。光レベルは受信器自身の出力によって、或いは受信器の外部の別の検出器によって、表すことができる。 (もっと読む)
1 - 2 / 2
[ Back to top ]