
リザード テクノロジー エイピーエスにより出願された特許
1 - 2 / 2
マルチサウンドの入力を聴覚的に分離するDSPベースの装置
特に、多数の音声入力を聴覚的に分離する方法であって、異なる音の位置から複数の音声入力信号を受信するステップと、デジタルシグナルプロセッサ(DSP)を使用して、頭部伝達関数(HRTF)を用いてこの音声入力信号をフィルタリングすることによって、この音声入力信号を仮想聴覚空間の異なる位置に割り当てるステップと、HRTFフィルタリングした音声入力信号を2つの特性で変更するステップであって、その変更の際に、ピッチが変更され、且つ異なる大きさの声道を模した異なるフィルタを用いて信号がフィルタリングされて、音声入力信号が互いに分離される、前記音声入力信号を変更するステップとを含む方法を提供する。 (もっと読む)
音源定位ロボット
指向性の高いトカゲの耳をモデリングする生態模倣ロボットを提供する。指向性は極めてロバストであり、神経処理は非常に簡単である。したがって移動式の本音源定位ロボットは容易に小型化することができる。本発明は2つの小型マイクロフォンからの音の入力を用いて、トカゲの耳の聴覚を模倣する単一な電気回路に基づく。回路はロバストな指向性をおよそ2−4kHzで生じる。回路の出力はモデル神経システムに供給される。神経系モデルは両側性であり、帯域通過フィルタのセットを含んで、両耳からの入力を比較するシミュレーションされたEIニューロンを有する。本モデルはデジタル信号プロセッサ上のソフトウェアで実装され、ロボットの左右のステアリングモーターを制御する。さらに、神経系モデルは、装置を自動校正するために自己適応できる神経ネットワークを含む。 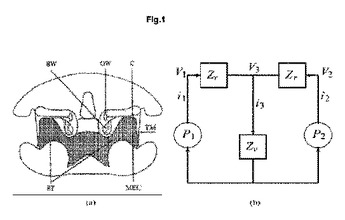 (もっと読む)
(もっと読む)
1 - 2 / 2
[ Back to top ]