
ディーア・アンド・カンパニーにより出願された特許
41 - 50 / 109
第1の農業機械と並行して田畑一面を走行するように操縦することができる第2の農業機械を操縦するための方法および装置
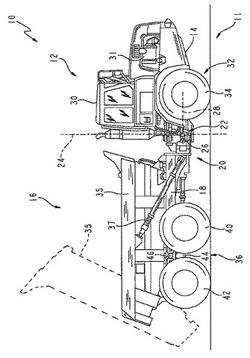
本発明は、第1の農業機械(10)に対して相対的に、田畑(34)一面で操縦することができる第2の農業機械(12)を操縦するための方法および装置に関し、
距離計(60)であって、農業機械(12)の1つの上に搭載され、水平領域にわたる隣接した対象物の方向および距離に関する測定値を記録するように動作することができる、距離計(60)と、
評価手段(68)であって、距離計(60)に接続され、操縦信号を出力するように設計され、その操縦信号は、距離計(60)の測定値に基づき、第1の機械(10)に対して相対的に第2の機械(12)を誘導する、評価手段(68)とを備える。
評価手段(68)は、距離計(60)によって時間的に連続して記録された、複数の測定値を参照して、記録された測定値から、距離計(60)を備えていない機械(10)に割り当てることができる測定値を選択し、そして選択された測定値を使用して、操縦信号を生成するように、動作することができることが提案されている。 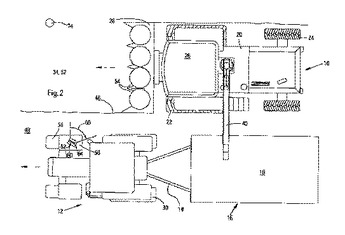 (もっと読む)
(もっと読む)
連接車両安定化システム
【課題】連接車両を提供すること。
【解決手段】連接車両は、車両のトレーラ部の転覆を阻止するためになされた安定化システムを含む。
(もっと読む)
トルク測定方法およびその装置

【課題】農耕用車両の費用効果に優れたトルク測定システムを提供する。
【解決手段】農耕用車両と連関するトルク測定装置で、回転シャフト18、前記回転シャフト上の第1の検出可能な特徴20および第2の検出可能な特徴22、前記第1の検出可能な特徴と近接する第1のセンサ28、前記第2の検出可能な特徴と近接する第2のセンサ30、電気制御器36を含み、前記回転シャフトが長手方向軸のまわりを回転するのにつれて、前記第1のセンサは第1の信号を生成し、前記第2のセンサは第2の信号を生成する。前記電気制御器はサンプリングレートで第1の信号および第2の信号をサンプリングする。第1の信号は第1の周波数を持ち、サンプリングレートは第1の周波数の2倍未満である。前記電気制御器は、第1の信号および第2の信号を用いて前記回転シャフトにおけるトルクを表すトルク量を計算する。
(もっと読む)
クリーニング特徴を持つディファレンシャルトランスミッション
【課題】回転するギヤ及び一連のリミテッドスリップクラッチプレートに、加圧した潤滑剤を供給する閉鎖型のリミテッドスリップディファレンシャルトランスミッションを提供する。
【解決手段】クラッチプレートは、加圧された制御流体の作用により係合する。スプールバルブを持つバルブアッセンブリが係合圧力に応答し、加圧された流体の一部をクラッチプレートからサンプチャンバ及びトランスミッションに排出し、これにより、クラッチプレートに溜まった屑をパージできる。スプールバルブは、バルブの中間移動中にしか流体を通さないように構成されており、これにより、トランスミッション及びリミテッドスリップクラッチ用の潤滑流体からの圧力損失を最小にする。
(もっと読む)
無限可変トランスミッションを用いた動力制限制御付き作業機械
【課題】無限可変トランスミッションと結合した内燃エンジンを含む作業機械において、トルク制御および無限速度制御を可能として燃料効率を高める。
【解決手段】作業機械は、内燃(IC)エンジン12と、ICエンジン12と結合された無限可変トランスミッション14とを含む。IVT14は、可調節モジュール18と機械式モジュール20とを含み、可調節入力/出力(I/O)比を有する。クラッチ22は、機械式モジュール20と結合されており、出力を有する。可調節操作者入力デバイス40は、動力制限制御を表す出力信号を供給する。少なくとも1つの電気処理回路36が操作者入力デバイス40と結合されており、操作者入力デバイス40からの前記出力信号に応じて、前記I/O比および前記クラッチ出力の選択された組み合わせを制御するように構成されている。
(もっと読む)
無限可変トランスミッション用トルク制限制御を有する作業機械
【課題】低対地速度条件において、牽引力の逸失が生じやすくない、IVTと結合した作業機械を提供する。
【解決手段】作業機械は、出力を有する内燃(IC)エンジンと、ICエンジンの出力に結合されている無限可変トランスミッション(IVT)とを含む。IVTは、液圧モジュールと機械式ドライブトレーン・モジュールとを含む。圧力変換器が、液圧モジュールと関連し、その液圧モジュール内の液圧圧力を表す出力信号を供給する。1つの電気処理回路が、圧力変換器からの出力信号に応じて、ICエンジンの出力を制御するように構成されている。
(もっと読む)
無限可変トランスミッションによる作業機械の惰力走行および制動制御
【課題】IVTを有し、急激で不愉快な減速がなく作業機械を速度低下させ停止させることができる作業機械を提供する。
【解決手段】作業機械は、出力を有するICエンジン12と、ICエンジン12の出力に結合された入力を有するIVT14と、対地速度アクチュエータ32とを含む。対地速度アクチュエータ32と関連した所望速度センサ34が、より低い対地速度を示す出力信号を供給する。少なくとも1つの電気処理回路は、IVT入力からICエンジン出力へ逆駆動される正味のトルク伝達が実質的にゼロになるように、センサ出力信号に応じて、IVT14の入力/出力(I/O)比を増大させるように構成されている。
(もっと読む)
エンジン負荷に応じて自動的にIVT出力を調節する作業機械
【課題】ICエンジンの過剰負荷状態を回避するように、IVT出力を調節可能にする作業機械を提供する。
【解決手段】作業機械は、内燃(IC)エンジンと、ICエンジンに結合されている無限可変トランスミッション(IVT)とを含む。少なくとも1つのセンサが、ICエンジンに対するリアル・タイム負荷値を表す出力信号を供給する。少なくとも1つの電気処理回路は、ICエンジンに対するスレッシュホールド負荷値とICエンジンに対するリアル・タイム負荷値とに応じて、IVTの出力を制御するように構成されている。一実施形態では、少なくとも1つの電気処理回路は、ICエンジンと関連したエンジン制御ユニット(ECU)と、IVTと関連したトランスミッション制御ユニット(TCU)とを含む。
(もっと読む)
無段変速機構のためのトルク制限制御を備える作業機械
【課題】出力を有する内燃(IC)機関と、該内燃機関の出力に連結される無段変速機構(IVT)とを含む作業機械を提供すること。
【解決手段】無段変速機構は調整可能な入力/出力(I/O)比を含む。オペレータ調整可能トルク制御入力装置が出力信号を与える。少なくとも1つの電気処理回路がトルク制御入力装置に連結され、トルク制御入力装置からの出力信号に依存する内燃機関の出力および/または無段変速機構の入力/出力比を制御するために形成される。
(もっと読む)
レーザ切断のためのデバイスおよび方法
【課題】レーザ切断のためのデバイスおよび方法を提供すること。
【解決手段】デバイス10は、レーザ切断ヘッド22を基準位置へと運ぶ、電子的に制御可能なロボット12と、メモリに格納された基準位置座標に対してロボット12を制御し、レーザ切断ヘッド22が基準位置座標運ばれた後で被加工物からレーザ切断ヘッド22までの距離を補正する距離補正デバイス26とを含む。レーザ切断の間品質基準を保証するために、被加工物24の特定の公差が維持されなければならない。この点に関して、被加工物24を測定する追加の測定ステップを避けるために、レーザ切断ヘッド22の距離補正後に制御ユニット18によって取得された位置座標とメモリに格納された基準位置座標との比較が、レーザ切断プロセスが開始される前に行われるような方法で、制御ユニット18が形成かつプログラムされる。
(もっと読む)
41 - 50 / 109
[ Back to top ]