
ディーア・アンド・カンパニーにより出願された特許
71 - 80 / 109
制御された操向緩衝作用を有する連結式作業車両操向システムおよびそれに関連する方法
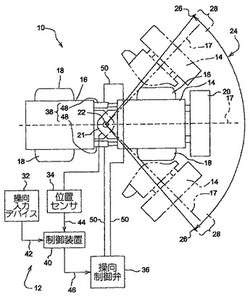
【課題】連結された第1の車両および第2の車両を備える作業車両のための操向システムを提供する。
【解決手段】この操向システムは、制御装置を備えており、第1車両部であって、第2車両部に関し、連結軸を中心に第1車両部の位置範囲における終端領域の終端に向く第1車両部に対して要求される要求操向速度が、少なくとも予め決められた操向速度であるかどうかを速度要求信号から判定し、第1車両部が位置範囲における終端領域に位置するかどうかを位置信号から判定し、および要求操向速度が少なくとも予め決められた速度であり、かつ、第1車両部が終端領域に位置する場合には、第1車両部の実際の操向速度を要求操向速度よりも小さくするような信号を出すように適合される。これに関連する方法も開示される。
(もっと読む)
無限軌道チェーンにおけるジョイントとして使用するためのカートリッジ及びそれに関連する方法

【課題】リンク間の相対的な回転のために、無限軌道チェーンのリンク間のジョイントとして使用するためのカートリッジの提供。
【解決手段】無限軌道チェーン(10)のリンク(14)間のジョイントとして使用するためのカートリッジ(12)が提供されている。当該カートリッジ(12)は、前記リンク(14)に取り付けられる前に組み立てられるように設計されている。関連する方法も開示されている。
(もっと読む)
操縦桿非作動化
本発明は、作業者が始動した制御信号を車両制御器に伝達するための肘掛け搭載操縦桿に関する。複数のスイッチが、制御信号を車両制御器に届けるためには、作業者が操作位置に安全に位置することを必要とする。全てのスイッチが実質的に同時に状態を変更するときのみ、それに応答して操縦桿が作動化または非作動化する。 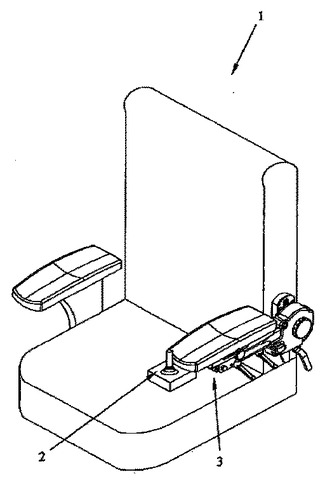 (もっと読む)
(もっと読む)
ローダ
【課題】車両が危険な動作状態または荷重状態に近づくほど漸進的に機能を減速させるローダを提供する。
【解決手段】ローダは、液圧操作式伸張アームと、ローダにおける荷重状態をモニタリングするためのセンサ66と、液圧機構36とを備え、液圧機構は、ピストンロッド側に1つの供給管路38とピストン側に1つの供給管路40とを備えた液圧シリンダ24と、液圧シリンダを制御するための機械的切替え可能制御デバイス42と、液圧源28と、液圧タンク30と、電子制御ユニット64とを示す。危険な荷重状態に近づくにつれて液圧シリンダの減速作動を達成するために、制御デバイスと液圧シリンダとの間の体積流量を制限するための手段を備え、センサによって供給されるセンサ信号に応じて、液圧シリンダのピストンロッド側における供給管路またはピストン側の供給管路の少なくとも1つにおいて体積流量を制限する。
(もっと読む)
ローダ
【課題】車両が危険な動作状態または荷重状態に近づくほど漸進的に機能を減速させるローダを提供する。
【解決手段】液圧操作式伸張アームと、荷重状態をモニタリングするためのセンサ66と、前記伸張アームおよび/または前記伸張アームに取り付けられた用具を作動させるための液圧機構36とを備え、前記液圧機構36は、少なくとも1つの液圧作動式制御デバイス42と、前記少なくとも1つの制御デバイス42のための液圧制御圧力信号を発生するための液圧機械式作動デバイス34と、電子制御ユニット64と、制御圧力を変化させるための手段62を備え、これらの手段は、前記センサ66によって供給されるセンサ信号に応じて、前記作動デバイス34によって発生する制御圧力を変化させる。
(もっと読む)
移動機器用車載訓練モード
【課題】 車載訓練システムを備える移動車両を開示する。
【解決手段】 この移動車両は、シャーシ、地面に接触して、シャーシを推進させるように構成した牽引装置、少なくとも1つの機能を実行するために動作可能な生産装置、生産装置を制御するために作動可能な入力装置、入力装置の作動に呼応して生産装置を動作させる構成とした制御システム、及び制御システムに動作可能に結合されたコントローラで構成される。コントローラは、入力装置の作動に呼応して生産装置が第1のタスクを実行できるようにした少なくとも1つの運転モード及び生産装置が第1のタスクを実行できないようにした訓練モードに適合する。
(もっと読む)
ローダーの電子的フロート特性制御システム
【課題】ローダーの電子的フロート特性制御システムの提供。
【解決手段】ステップ84において、コントローラは力の誤差を算出する。力の誤差は、シリンダに作用する正味の力と基準力との差である。ステップ86において、コントローラは力の誤差がよりゼロに近づくように適切なポンプ・コマンドを決定する。ステップ88では、ポンプは、ステップ86で決定されたポンプ・コマンドにより起動する。ステップ88の後に、本方式はステップ78に戻るが、フロート機能がステップ76で起動される限りは、繰り返し行われる。制御方式74は、シリンダ42の各チャンバー44、46及び48の圧力を測定し、シリンダ42に作用する正味の力をゼロとして、ローダーに自動的にフロート機能を提供できるように、ポンプ62を制御する。
(もっと読む)
液圧潤滑フィルタ回路
【課題】汚染物質から車両の液圧システムを保護するフィルタシステムまたはフィルタ回路を提供。
【解決手段】コンポーネント潤滑回路12、および制御弁ユニット20,22,24に供給するポンプ14,16を有する車両の液圧システム10が、フィルタ回路30を持つ。フィルタ回路30は、第1のフィルタ回路出口32、第2のフィルタ回路出口34を備え、サンプライン36と出口34の間に、サクションフィルタ44と、直列に連結されるサクションバイパス・フィルタ46とサクションバイパス弁46を持つ。また、戻りライン39が入口38に連結され、出口32と入口38および40の間に、戻りフィルタ52と、直列に連結される戻りバイパスフィルタ54と戻りバイパス弁56と、圧力応答性の背圧弁60、圧力感知パイロットライン62、戻りライン33のオリフィス64を持つ。
(もっと読む)
アプリケーション・ソフトウェア及びハードウェア検査を自動化するために仮想入力及び出力を使用する方法
【課題】ハードウェア・イン・ザ・ループ試験を自動化する。
【解決手段】自動診断検査方法は、監視する工程、変更する工程、上書きする工程、提供する工程及び/又は検査対象アプリケーションに与えられる入力データと検査対象アプリケーションにより供給される出力データに対して読み出し専用のアクセスを提供し、入力データと出力データ間の所望の関係を比較する工程として、記述される。好ましいシステムは、検査制御システムを検査対象アプリケーションに関連づけるコントローラー・エリア・ネットワークを含む好ましい方法を有する通信網を備えている。自動診断検査システムには、検査対象アプリケーションに動作可能に結合された検査制御システムが含まれる。
(もっと読む)
車両駆動装置のための操舵補償型速度制御方法
【課題】範囲を超える負荷状態でのIVTを備えた車両の方向安定性を増すための装置を提供する。
【解決手段】内燃機関8と、フリーホイーリングする操舵可能な前輪7と、被駆動後輪26と、エンジンから後輪へトルクを伝達するための無断可変変速機(IVT)10と、検知されたパラメータの関数としてIVTを制御し且つ後輪速度を命令するためにIVTに速度コマンドを供給するための制御ユニット30とを備えている車両のための車両駆動装置6を制御する方法。前輪の操舵角を検知するステップと、前輪速度を検知するステップと、後輪速度を検知するステップと、前輪速度と検知された操舵角との関数として推定補正車両速度を発生するステップと、推定補正車両速度と後輪速度との比較に応じて後輪(車両)速度を増すステップとを含んでいる。IVTは、ハイブリッド電気駆動装置によって実施化される。
(もっと読む)
71 - 80 / 109
[ Back to top ]