
ビー・エル・オートテック株式会社により出願された特許
1 - 10 / 20
工具交換装置
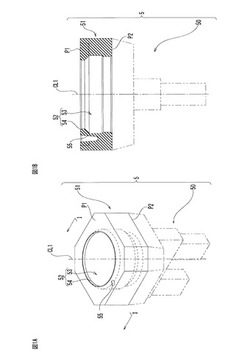
【課題】本発明は、ツールの交換を繰り返し行っても、ツールを適正に取り付けることのできる工具交換装置を提供する。
【解決手段】 一方向に延びる中心線を有する挿入部を有する装置本体と、ツールを装置本体に固定するロック機構とを備える。ロック機構は、一方向に往復移動可能に設けられた直動体と、複数のロック部材とを備え、直動体は、第一端を挿入部側に位置させて装置本体内に配置された軸部と、該軸部の第一端側に対して一方向に移動可能に連結された押圧部と、押圧部を一方向の何れか一方側に付勢する弾性体とを備える。直動体が一方向の何れか一方側に向けて移動することで、押圧部が複数のロック部材を押圧して該複数のロック部材の一部が挿入部の外周から外方に突出する一方、直動体が一方向の何れか他方側に向けて移動することで、複数のロック部材が挿入部内に退避する又は退避可能になる。
(もっと読む)
回転軸ロック機構

【課題】 回転軸の回転を任意の回転位置で確実に規制することのできる回転軸ロック機構を提供する。
【解決手段】 軸心回りで回転可能に支承された回転軸の回転を規制する回転軸ロック機構において、一端側から他端側に向けて外径が縮小するテーパ軸部を有し、該テーパ軸部の軸心が回転軸の軸心と直交する方向に延びるように配置されるとともに、該テーパ軸部の軸心方向に移動可能に設けられた軸規制体と、前記テーパ軸部の大径側から小径側に向く付勢力を前記軸規制体に対して作用させる付勢手段とを備え、前記軸規制体は、前記付勢手段による付勢でテーパ軸部が回転軸の外周に圧接するように構成されていることを特徴とする。
(もっと読む)
射出成形品自動取出ロボット用の成形品保持装置
【課題】四つ又は四の倍数の数の型が二行多列でマトリックス状に配置された金型を用いて成形品を成形することを前提に、型同士の間隔を異にする金型に交換されても、成形された成形品のそれぞれを保持することのできる射出成形品自動取出ロボット用の成形品保持装置を提供する。
【解決手段】成形品自動取出ロボットのロボットアームRAに連結されるユニットベース20と、ユニットベース上に二行二列で配置された四つの保持手段21とを有する装置ユニット2を備え、装置ユニットは、各行の保持手段を列方向に接離させる第一作動手段22と、各列の保持手段を行方向に接離させる第二作動手段23とを備えている。
(もっと読む)
アーム駆動機構、及びこれを備えたマニピュレータ
【課題】先端部に作業ツールが装着されるアーム機構を大型化させることなくアーム機構を姿勢変更させることのできるアーム駆動機構及びこれを備えたマニピュレータを提供する。
【解決手段】アーム駆動機構は、一対の回転体と、両回転体に掛け渡される無端環状体と、駆動モータにより回転されるスクリューシャフトと、スクリューシャフトに螺合され、無端環状体の一部が固着されたスライダとを備え、他方の回転体が一方の回転体よりも小径に設定され、無端環状体の回転体間にある二つの対向部のうちの一方の外周側が巻き掛けられて他方の回転体側にある対向部を平行にするアイドラを備え、スクリューシャフトが一方の対向部の外周側と対向するように配置されている。
(もっと読む)
ロボットハンド
【課題】把持体を回転させるための駆動源を定位置に設置することができ、被把持物配置予定位置周りで把持体を無制限に回転させることのできるロボットハンドを提供する。
【解決手段】把持体61を移動させる第一駆動部62と、把持体を回転させる第二駆動部63とを備え、第一駆動部は、スライドシャフト64と、駆動源の出力でスライドシャフトを軸線方向に往復動させるスライド手段65と、先端部に把持体が連結された回転レバー66と、回転レバーを回転可能に支持し、所定位置に位置した状態でスライドシャフトの一端部周りで回転自在に設けられた支持体67とを備え、第二駆動部は、駆動源の出力を支持体に伝達し、支持体をスライドシャフト周りで回転させる伝達機構とを備え、スライドシャフトは、支持体に支持された回転レバーの基端部を収容する無端円環状の溝が形成されている。
(もっと読む)
触覚センサ
【課題】磁石を内包した柔軟層を用いて簡便な構成を用いることにより、単純な構造の接触センサを開発する。
【解決手段】磁石を内包した柔軟層と、磁気抵抗素子とインダクタを配置した基板層とを積層した構造有する触覚センサであり、柔軟層の変位に伴い変位する磁石の磁束密度に関し、静的磁束密度情報を磁気抵抗素子にて感知し、動的磁束密度の変化をインダクタにて感知する触覚センサであって、磁気抵抗素子は、3個以上が配置されており、インダクタは、1個以上配置されている触覚センサ。
(もっと読む)
清掃装置及び清掃装置の停止具
【課題】清掃装置を回収位置まで容易に誘導・停止させる。
【解決手段】床面104と壁面105とによって囲まれた領域に液体を貯留可能な構造物の床面104を清掃する清掃装置において、構造物の床面104を走行しながら清掃する清掃装置本体1を有するとともに、清掃装置本体1を回収する場合に、清掃装置本体1を壁面105に平行に走行させることで所定の回収位置に誘導する誘導手段8を備える。
(もっと読む)
清掃装置
【課題】簡単な操作で清掃装置を回収位置まで誘導することができるようにする。
【解決手段】水中において床面を走行しながら清掃する清掃装置本体1と、清掃装置本体1を遠隔操作する無線式の遠隔操作手段2とを備える清掃装置であって、遠隔操作手段2は、清掃装置本体1に設けられる少なくとも2つの受信部11,11と、各受信部11,11から離れた位置で、各受信部11,11に所定の超音波を送信する送信機12とを備え、清掃装置本体1は、送信機12から送信される超音波を各受信部11,11が受信したときに、各受信部11,11で受信された超音波の受信情報が異なる場合に、各受信情報が等しくなるように方向転換をするとともに、各受信部11,11の受信情報が等しくなったときに、その進路が送信機12に向くように構成される。
(もっと読む)
起歪体
【課題】 二つの部材を連結した状態で二つの部材間の力を精度よく測定することのできる起歪体を提供することを課題とする。
【解決手段】 二つの部材のそれぞれに直接的又は間接的に連結される一対の連結部と、両端が一対の連結部に連結され、厚み方向の少なくとも何れか一方の面に歪みゲージが取り付けられるゲージ取付部が設定されたプレート状の起歪部と、一対の連結部間で起歪部の厚み方向の面に対して間隔をあけて配置されるとともに両端が一対の連結部に連結され、起歪部を基準にして対称的に形成された一対の連結支持部とを備えていることを特徴とする。
(もっと読む)
超音波アレイセンサおよび信号処理方法
【課題】本発明は、ゴースト、ノイズ低減、リアルタイム性ならびに対象物の全体像取得に優れた超音波アレイセンサならびにその信号処理方法を提供する。
【解決手段】複数の圧電体を受信用センサとして2次元配列した超音波アレイセンサであって、超音波アレイセンサの周囲に複数の超音波発信源を配設する。また、複数の圧電体を受信用センサとして円筒側面に2次元配列した超音波アレイセンサであって、円筒の周方向ならびに軸方向に複数の超音波発信源を配設する。
(もっと読む)
1 - 10 / 20
[ Back to top ]