
田屋エンジニアリング株式会社により出願された特許
1 - 4 / 4
ラジコン模型のサーボモータ中立位置設定装置
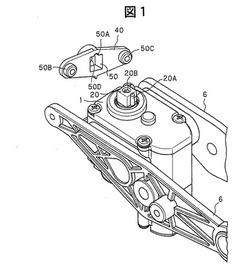
【課題】サーボモータの出力軸にサーボホーンを嵌合する単純構造で高い精度で中立位置を設定可能としたラジコン模型のサーボモータ中立位置設定装置を提供する。
【解決手段】サーボモータ1の出力軸20のサーボホーン40の嵌合穴50と嵌合する部分を角柱とし、該角柱の外側壁の少なくとも1面にサーボホーン40の嵌合穴50の挿入方向と平行に形成された凸条20Aを形成し、嵌合穴50の内側壁の少なくとも1面に出力軸20の外側壁に有する凸条20Aの形成方向と同方向に形成されて当該凸条に嵌合する凹条50Aを設け、筐体側に、サーボモータ1の出力軸20の一方向での最大回転角度と該一方向と逆の方向での最大回転角度を規制する制限する構造を設け、サーボモータ1の出力軸20が一方向と逆方向の最大回転角度位置にある時のポテンショメータの各出力値の中間値をサーボモータの出力軸の標準中立位置と定める。
(もっと読む)
ラジコン模型

【課題】操縦者(取り扱い者)等の安全を確保すると共に、ラジコン模型自身の安全確保も実現したラジコン模型を提供する。
【解決手段】中央制御装置3に有する安全管理部312は、バッテリー27が正しく接続された時は、ブザー制御部313にバッテリーが接続されたことを示す第1パターン鳴動信号指令を供給し、バッテリーが正しく接続された状態でスタートボタンが押されているチェック期間は、ブザー制御部313にスタート操作中を示す第2パターン鳴動信号指令を供給し、チェックによって正常と判定した場合には、ブザー制御部313に動力モータ7が駆動可能なスタンバイ状態になったことを告知する第3パターン鳴動信号指令を供給する判定部314を有する。
(もっと読む)
ラジコン模型の統合制御システム
【課題】ラジコン模型に搭載される電子制御機器の制御、動作、異常検出などの情報を連携して管理し、制御の実行を総合判断することで安全性を高め、かつ操縦性能を向上する。
【解決手段】受信機2からの操縦指令信号、センサ部20で検出された各種の検出信号、設定値格納部40Aに格納されている設定値、ID格納部40Cに格納されたバッテリー17、動力モータ7、操舵用サーボモータ8,9,10の識別データは統合制御装置50において、その統合制御部50Aで連携処理される。1つの制御値が単独で実行されることなく、他の関連する操縦指令信号のデータやセンサの検出データを参照して、安全で効果的な飛行制御を可能にする。
(もっと読む)
ラジコン模型の制御装置およびその操縦パラメータ設定システム
【課題】制御パラメ−タをラジコン模型の動特性に容易に設定し、あるいは変更でき、送信機側の負担を軽減したラジコン模型の制御装置およびその制御パラメータ設定システムを提供する。
【解決手段】パーソナル・コンピュータ200で変更・設定し、ラジコンヘリコプターに通信ケーブル12を介して転送された設定情報の各種設定値は制御パラメ−タとしてメモリ4の設定値格納部4Aに格納される。ラジコンヘリコプターの動力モータ7の回転開始から浮揚、飛行、着陸の期間に、送信機1から送信される操縦指令信号を構成する各制御信号はラジコンヘリコプターに搭載された受信機2で受信される。操縦指令信号は受信機2のデコーダ2Bで復号され、各種の操縦指令信号として再生される。再生された操縦指令信号は制御信号加工部5でメモリ4の設定値格納部4Aに格納されている設定値に従ってそれぞれ加工される。加工された各操縦指令信号は、後段の駆動機構に供給され、それぞれの制御対象を制御する。
(もっと読む)
1 - 4 / 4
[ Back to top ]