
三菱スペース・ソフトウエア株式会社により出願された特許
61 - 70 / 148
人工物検出装置及び人工物検出方法及び人工物検出プログラム
【課題】多偏波観測によって人工物のみを精度よく検出する。
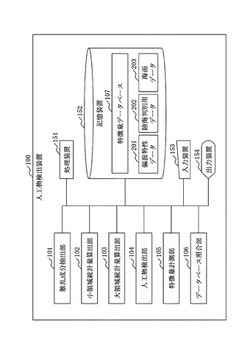
【解決手段】合成開口レーダを用いた2偏波観測あるいは4偏波観測の結果を偏波特性データ201として予め記憶する人工物検出装置100にて、散乱成分抽出部101は、偏波特性データ201から、表面散乱成分と2回散乱成分とを、観測位置ごとに抽出する。人工物検出部104は、散乱成分抽出部101により2回散乱成分が抽出された観測位置の集合である第1領域と、第1領域の周囲で散乱成分抽出部101により所定量以上の表面散乱成分が抽出された観測位置の集合である第2領域とを含む領域を、人工物として検出する。
(もっと読む)
人工物検出装置及び人工物検出方法及び人工物検出プログラム

【課題】多偏波観測によって人工物のみを精度よく検出する。
【解決手段】合成開口レーダを用いた4偏波観測の結果を偏波特性データ201として予め記憶する人工物検出装置100にて、散乱成分抽出部101は、偏波特性データ201から、表面散乱成分と2回散乱成分と体積散乱成分とヘリックス散乱成分とを、観測位置ごとに抽出する。人工物検出部104は、散乱成分抽出部101により2回散乱成分と体積散乱成分とヘリックス散乱成分とのうち1種類以上の散乱成分が抽出された観測位置の集合である第1領域と、第1領域の周囲で散乱成分抽出部101により所定量以上の表面散乱成分が抽出された観測位置の集合である第2領域とを含む領域を、人工物として検出する。
(もっと読む)
標高情報補間装置、標高情報補間プログラム及び標高情報補間方法
【課題】ラスターデータとして与えられた標高情報の一部が欠落している場合に、欠落した標高情報を補間して、欠落のない標高情報を示すラスターデータを生成することを目的とする。
【解決手段】等高線データ生成部12は、ラスターデータ入力部11が入力したラスターデータから等高線データを生成する。等高線補間部13は、等高線データ生成部12が補間した等高線データのうち、標高情報が欠落した部分の等高線を補間する。ラスターデータ生成部14は、等高線補間部13が補間した等高線データからラスターデータを生成する。ラスターデータ補間部15は、ラスターデータ生成部14が生成したラスターデータのうち、等高線補間部13が補間してもなお欠落している標高情報を補間する。
(もっと読む)
地震計、地震ノイズ判定方法、プログラム
【課題】トリガ検知から迅速に地震ノイズ判定を行う地震ノイズ判定技術を提供する。
【解決手段】加速度センサ10によって検出された加速度の値がトリガレベルを超えたと判断された場合には、加速度センサ10によって検出された加速度の監視を行う必要があると判断し、その後加速度センサ10によって検出された加速度の値が第一判定基準値を超えたか否かを監視する。具体的には、トリガレベルを超えてから監視時間が経過するまでに、加速度センサ10によって検出された加速度の値が第一判定基準値を一度でも超えたら、監視時間が経過した時点で、加速度センサ10がノイズに起因する加速度を検出したと判定する。一方、監視時間が経過するまでに、加速度センサ10によって検出された加速度の値が第一判定基準値を一度も超えなかったら、監視時間が経過した時点で、加速度センサ10が地震波に起因する加速度を検出したと判定する。
(もっと読む)
地震計、地震ノイズ再判定方法、プログラム
【課題】地震ノイズ判定処理時にノイズを検出したと判定された後に地震が発生した場合でも、その地震を確実に検出すること。
【解決手段】地震ノイズ判定処理において、加速度センサがノイズに起因する加速度を検出したと判定された場合には、加速度センサによって検出された加速度の値が報知基準値を超えるか否かを判定し、その加速度の値が報知基準値を超えるときには、その加速度が地震波に起因する加速度なのかノイズに起因する加速度なのかを判定する地震ノイズ再判定処理を実行する。すなわち、加速度センサによって過去に検出された所定数(50サンプル)の加速度の値を基に上下方向の振幅(V)と水平方向の振幅(H)の比(V/H)を計算し、そのうち最も大きい値が予め設定された設定値(一定値)を超えたら、加速度センサがノイズに起因する加速度を検出したと判定する(ノイズ判定)。
(もっと読む)
衛星設計支援装置、衛星設計支援プログラム及び衛星設計支援方法
【課題】人工衛星の搭載機器配置設計を容易にするための装置及びソフトウェアを提供することを目的とする。
【解決手段】2次元表示部111は搭載機器が配置された人工衛星モデルを2次元座標系に展開した展開図を表示装置に表示する。2次元表示部111が表示した展開図をモデル編集部120はキーボードやマウス等の入力装置で操作して、人工衛星モデルの搭載機器の配置等を編集する。モデル編集部120が編集した情報に基づき、温度計算部141は人工衛星が軌道を移動した場合の人工衛星モデルへの熱の入射量を計算して所定の位置での人工衛星モデルの搭載機器温度を計算する。そして、2次元表示部111は計算した人工衛星モデルの搭載機器温度を表示装置に表示する。以上を繰り返して、人工衛星の搭載機器配置設計を行う。
(もっと読む)
管理システム及び携帯電話端末及び無線タグ及び管理システムの管理プログラム及び携帯電話端末の端末通信プログラム及び無線タグのタグ通信プログラム及び管理システムの管理方法
【課題】管理対象者に携行させる装置を小型で安価にし、かつ広い範囲で管理対象者の安否確認を得ることができる安否確認システムを構築する。
【解決手段】安否タグ100と無線通信を行うとともに、通信網500を介してID管理装置300と通信を行う安否携帯200(携帯電話端末)であって、安否タグ通信部201が安否タグ100からタグID150を無線通信により受信し、位置情報取得部203が自安否携帯200の位置情報を取得し、ID伝送処理部202が安否タグ通信部201がタグ150IDを受信した場合に、受信したタグID150と受信時刻情報と取得した自安否携帯200の位置情報を含む受信端末位置情報と自安否携帯200を特定する受信携帯端末情報とを含むID情報251を生成し、通信部204がID伝送処理部202が生成したID情報251を、ID管理装置300へ送信する。
(もっと読む)
文献検索装置、文献検索方法および文献検索プログラム
【課題】多量の検索結果の絞り込み検索を行うために、文献情報中の文献用語、文献用語の属する分類、文献用語の重要度を示すスコアを情報として出力することを目的とする。
【解決手段】文献検索部110は入力したクエリーで文献データベース200にアクセスし文献情報を取得する。検索結果生成部120は、文献情報から文献用語を抽出し、文献用語の分類とスコアとを生成する。そして、検索結果表示部105は抽出した文献用語とその分類及びスコアを表示する。この分類は文献用語を示す階層構造に基づき、スコアは全文献情報での出現頻度が低くヒット文献情報での出現頻度が高いほど高い。
(もっと読む)
走行制御装置及び走行制御方法及びプログラム
【課題】月面車10の日陰部への進入を回避する事により、電力を確保し、低温保護を自律的に行う。
【解決手段】月面車は、サーモカメラ12で月面上の温度分布画像等を撮像する。平坦な地形に対して凹地形部には日陰部ができ、平坦な地形や凸地形部の太陽光照射側は日照となる。その際、月面では、日照部分は高温となり、日陰部分は低温となる。と走行制御装置100の近接度判断部24は、日陰部分との近接度を判断し、走行制御部28が、低温部分を避けて高温部分を走行するように駆動部の舵確認しながら遠隔操作制御する。即ち、駆動部と低温部部の境界の距離が一定範囲内になった場合には高温部分側に転舵させる。走行制御装置100の走行制御部28は、進行方向に低温部分がある場合、または、転舵しても駆動部と低温部分の境界の距離が一定範囲以内になる場合には、駆動部を停止させる。
(もっと読む)
電子機器植え込み検出装置、及び、警告システム、及び、プログラム、及び、電子機器植え込み検出方法
【課題】患者の肺野領域、特に右の肺野領域以外の胸部の領域にぺースメーカ本体等の電子機器が植え込まれている場合、患者の胸部X線画像データから電子機器が植え込まれていることを示している画像データか否かを判定して、患者がMR撮像やCT撮像されることを防ぐ。
【解決手段】電子機器植え込み検出装置30は、胸部X線画像データ301を画像データ入力部31により入力し、配線領域抽出部32により電子機器のリード線が配線された配線領域を画像データ301から抽出する。そして、ライン映像検出部33により配線領域の画像データにリード線のライン映像が示されているか否かを検出し、配線領域にライン映像が示されていることが検出された場合であって、機器植え込み判定部37により画像データに電子機器が植え込まれていることが示されている画像データであることを判定できた場合、警告出力部38により、警告信号302を生成して出力する。
(もっと読む)
61 - 70 / 148
[ Back to top ]