
株式会社明和eテックにより出願された特許
1 - 10 / 24
X線検査方法
【課題】肉厚補正治具を使用することなく簡易かつ正確に検査対象物の欠陥等を検出する。
【解決手段】異なる複数の既知の厚みを有する較正体に対してX線を照射して各厚みとこの部分のX線透過量の関係を測定するステップと、各厚みとこの部分でのX線透過量の関係が直線状になるように前記各厚みにおける較正値を決定するステップと、欠陥等の無い正常な検査対象物のX線透過量に基づいた画像をマスタ画像として得るステップと、マスタ画像の各部のX線透過量より当該X線が透過した部分の前記検査対象物の厚みを得るステップと、通常の検査対象物のX線透過量に基づいた画像をテスト画像として得るステップと、前記マスタ画像と前記テスト画像の各部のX線透過量の差分たる差分X線透過量に基づいた差分画像を算出するステップと、前記差分画像の各部の位置に対応した前記マスタ画像部分の厚みにおける前記較正値を前記各部の差分X線透過量に乗じて較正差分X線透過量を算出してこれに基づく較正差分画像を得るステップとを備える。
(もっと読む)
X線画像表示装置
【課題】簡易かつ高速にX線立体画像表示を可能にして被検査物の欠陥や異物を容易に発見できるようにする。
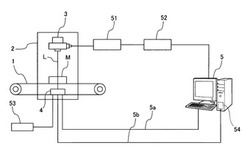
【解決手段】通過する被検査物Mに対して直交する平面内でX線光源31から拡散して被検査物Mを横断する帯状のX線を照射するX線発生器3と、被検査物Mを透過したX線を入光させて、被検査物Mの通過に伴って当該被検査物Mの透過二次元画像を得るラインセンサ4およびインターフェース回路54と、透過二次元画像の各部分につき、当該各部分をその位置情報に基づいて二次元平面上に配置するとともに、上記各部分における透過光量に応じた高さを上記二次元平面に直交する軸方向にとって透過三次元画像を得るパソコン5とを備えている。
(もっと読む)
X線検査装置

【課題】搬送される被検査物の欠陥等をインラインで正確に検出することが可能なX線検査装置を提供する。
【解決手段】通過する被検査物Mに対して直交する平面内でX線光源31から拡散し被検査物Mを横断する帯状のX線Lを照射するX線発生器3と、被検査物Mを透過したX線Lを入光させてその受光強度に応じた出力信号を発するX線ラインセンサカメラ4とを備える。パソコン5は、上記出力信号より被検査物Mの透過画像を生成するとともに、サンプル被検査物のマスタ画像を記憶しておき、透過画像とマスタ画像の位置合せを行なった後、位置合せを行なった透過画像とマスタ画像についてその伸縮を略一致させ、伸縮を略一致させた透過画像とマスタ画像との差分画像を得る。
(もっと読む)
温度測定装置
【課題】放射率の影響を受けることのない正確な温度を知ることができる温度測定装置を提供する。
【解決手段】被測定物Bの熱画像を得るサーモカメラ1と、被測定物Bの可視画像を得る可視光カメラ2とを備え、コンピュータ3にて、可視画像の必要部の輝度と当該必要部の放射率の関係を得て、上記必要部に対応する熱画像の必要部から得られた温度を上記放射率で補正して補正温度を取得し、当該補正温度によって正確な熱画像を得る。
(もっと読む)
三次元温度分布表示装置、テクスチャ作成装置および三次元温度分布表示方法
【課題】 三次元CADデータを備える立体的な測定対象物の表面温度分布を三次元的に簡易に表示する。
【解決手段】測定対象物1の二次元温度分布画像を遠隔的に取得する赤外カメラ2A〜2Cが複数設けられ、パソコン3は、CADデータから測定対象物1の三次元ワイヤフレーム画像を生成し、赤外カメラ2A〜2Cの設置点から見た三次元ワイヤフレーム画像に二次元温度分布画像を重ねて表示し、重ね表示された状態での二次元温度分布画像の各画素と三次元ワイヤフレーム画像を構成する各ポリゴンに対応付けられた二次元テクスチャ画像の各画素との対応関係を確定し、二次元温度分布画像の各画素における温度情報を二次元テクスチャ画像の各画素に付与して当該テクスチャ画像を完成し、完成した二次元テクスチャ画像を、これに対応するポリゴンに貼り付ける。
(もっと読む)
金型温度測定装置
【課題】電磁波に対するノイズ環境下においても、金型に設けた温度検出素子の温度信号を低消費電力で確実に型外へ送信することができる。
【解決手段】専用型2が汎用型1に対し相対移動可能に設けられた金型間の通信装置であって、専用型2の必要箇所に配設された温度検出素子4と、温度検出素子4から出力される温度信号を高周波パルス信号に変換する送信モジュール5と、専用型2と汎用型1にそれぞれ設けられて、その間に生じる電界により高周波パルス信号を伝達させる一対の電極状中継モジュール6,7と、汎用型1側に設けられて電極状中継モジュール6,7を介して専用型2から伝達された高周波パルス信号から温度信号を得る受信モジュール8とを備えている。
(もっと読む)
ワーク搬送装置およびこれを使用したワーク搬送方法
【課題】荷崩れして絡み合った状態のクランクシャフト等のワークを作業者の手を借りることなく自動で取り出し搬送できる。
【解決手段】ロボットアームの先端部11に搬送治具2が設けられ、搬送治具2は中央がアーム先端部11に支持され、その一端に三次元位置認識用のカメラ42を、他端には搬送されるクランクシャフトWのシャフト部W1に嵌装される筒状の保持具3を備えている。カメラ42の画像からシャフト部W1の姿勢と位置を特定し、保持具3内にシャフト部W1を相対的にを進入させた後、保持具3を開口が上方に位置するような姿勢にしてクランクシャフトW1を持ち上げて搬送する。
(もっと読む)
焼入れ深さ検査装置
【課題】測定コイルを移動させる必要がなく、かつ被検査材の焼入れ領域の局部的な深さを検出することができる。
【解決手段】略U字形に成形され、左右の脚部11,12の先端面が被検査材Wの表面に接触ないし近接対向させられた磁性体コア1と、励磁信号を出力するとともにその周波数を一定範囲で変更可能な交流電源と、磁性体コア1の一方の脚部11に巻回され、交流電源に接続されて励磁信号が印加される一次コイル21と、磁性体コア1の他方の脚部12に巻回されて一次コイル21の磁力線Mが通過する二次コイル22と、交流電源の励磁信号の周波数を逐次変更し、二次コイル22の出力信号85aが最大ないし最小を示す周波数より被検査材Wの焼入れ深さを検出する検出回路とを備える。
(もっと読む)
把持装置
【課題】 遊星歯車列を利用して、簡易な構造で異形の対象物や多少位置のずれた対象物を確実に把持する。
【解決手段】遊星歯車組4Aの、遊星歯車列5のサンギヤ51に入力軸11を連結するとともに、リングギア53に第1出力軸96を連結し、遊星歯車列6のサンギア61と、遊星歯車組4Bの、遊星歯車列7のサンギア71とを互いに一体に結合し、遊星歯車列7のリングギア73に第2出力軸97を連結するとともに、遊星歯車列8のサンギア81に第3出力軸98を連結し、かつ、遊星歯車列6,8のリングギヤ63,83の回転を規制して、第1出力軸96、第2出力軸97、および第3出力軸98によってそれぞれ3つの把持手段を作動させる。
(もっと読む)
コード検出装置およびコード検出方法
【課題】タグが歪んでいたり錆を生じている場合にもこれに形成されたコードを確実に検出することができる。
【解決手段】コードを形成したタグ1を互いに異なる方向から照射する複数の照明器2A,2B,2C,2Dと、各照明器を順次点灯作動させる照明切替手段41と、照明切替手段の切り替え作動に連動して、各照明手段2A〜2Dにより照明された上記コードを撮像するカメラ3と、各照明器2A〜2Dが点灯した時にカメラ3で得られた各撮像画像を加算するとともに、加算された画像に基づいてコードCdを復元する画像解析手段44とを備えている。
(もっと読む)
1 - 10 / 24
[ Back to top ]