
ローツェ株式会社により出願された特許
1 - 10 / 33
薄板状物の把持装置、および薄板状物の把持方法
【課題】
摩擦による塵埃の発生及び飛散を抑制し、従来の搬送ハンドからの置き換えが容易に且つ安価に出来、軽量で、かつ狭隘な場所にもアクセス可能な薄型の把持装置を提供すること。
【解決手段】
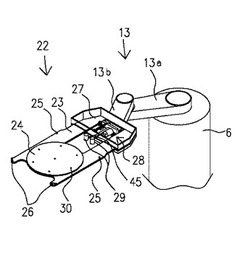
把持装置22は、内部に圧縮気体流通のための流路36と、圧縮気体を噴出させる噴出口30を有する搬送フィンガ23と、搬送フィンガ23先端に固定された第1の把持部材26と、駆動手段28によって動作させられる第2の把持部材29とを具えている。圧縮気体の噴出力によって浮上させられた薄板状物の周縁部を、第1の把持部材26と第2の把持部材29とで、位置ずれ補正を行いながら把持する。
(もっと読む)
マイクロプレート用ピックアップ装置、及びマイクロプレート供給回収装置

【課題】従来技術において、蓋部と本体部に分離される2つのユニットとから構成されるマイクロプレートを持ち上げて取り出す際に、単純にマイクロプレートの側面を2つのアームで挟んで持ち上げるものであるため、持ち上げる際に本体部と蓋がはずれて、落下するおそれがあった。
【解決手段】本発明のピックアップ装置は、本体部と蓋部とを備え、該本体部及び蓋部のそれぞれを側面から挟持可能な矩形のマイクロプレートを、挟持して取り上げるものであって、前記マイクロプレートの側面を挟み込み挟持する際に、一方の挟持アームで前記本体部と当接し他方の挟持アームで前記蓋部と当接させて前記マイクロプレートを左右から挟持する1対の挟持アームと、前記1対の挟持アームを開閉駆動する開閉駆動部と、前記1対の挟持アームを上下方向に昇降させる昇降駆動部と、前記開閉駆動部および昇降駆動部の動作を制御するピックアップ制御部と、を備える。
(もっと読む)
自動位置ずれ補正方法、及び自動位置教示方法。
【課題】
フィンガ部が水平面内で回転方向にずれて取り付けられていても、最適な位置教示データが自動で取得できる位置教示方法を提供する。フィンガ部の位置ずれ量を検出して、このずれ量を補正して、最適な位置に被搬送物を搬送できる位置教示方法を提供する。
【解決手段】
搬送ロボットが移動可能なX軸方向に対し平行に備えられた第1、第2の目的物を検出することで搬送ロボットの中心位置を特定し、その後、第3の目的物を検出する。これらの動作で得られた位置データから最適な搬送位置を自動で教示する。
(もっと読む)
環境槽、環境装置及び環境処理方法
【課題】 物品の加熱、冷却、乾燥などの環境処理を連続的に行う場合、物品を環境槽内に搬入搬出する際、ドアを開けると槽内の環境が大幅に変化し、又、新搬入物品が隣にある物品に環境条件の影響を与えてきた。
【解決手段】 環境槽内に連続的に物品を移動させる循環機構を設け、本機構の進行方向に直角に複数の仕切り板を設け、又、該環境槽のドア付き開口部の周辺に、該仕切り板に直角且つ非接触に蓋部を固定する。仕切り板の間に設けた物品収容部が、開口部の前に来た時循環を止め、ドアを開けて物品を搬入搬出する。
(もっと読む)
箱状物ストッカ
【課題】前工程で積み重ねられたマイクロプレートを、多数積み重ねられたままカセットで供給し、カセットの上部開口部から順に取り出すことができる箱状物ストッカを提供する。
【解決手段】箱状物19を箱状物載置板に載せて昇降させる昇降機20と、前記昇降機の周りを回転する回転カセット台26aと、前記回転カセット台に載せる2以上のカセット21と、を備えて、前記カセットが前記箱状物載置板の上方位置となるように前記回転カセット台を回転して、前記箱状物載置板により前記カセットの下部にある開口部を通して前記カセット内に重ねて収納する前記箱状物を持ち上げて、前記カセット上部にある箱状物取り出し口から取り出し、または前記カセット内に収納する。
(もっと読む)
円盤状物把持装置並びに搬送機、移載装置及び搬送方法。
【課題】大型半導体ウエハをコンテナ内に撓みを防止してコンパクトに収納するために、複数のウエハを縦方向に搬入、搬出する円盤状物把持装置を提供する。
【解決手段】コンテナ内のウエハ8の中心を通る水平な線より上側に配置され、先端が厚み方向、且つ、ウエハ奥側の周縁に沿う方向に曲がった細長板状のエンドエフェクタ3と、エンドエフェクタ先端の曲がり側の厚み部に備えウエハの周縁部を把持する奥側パッド4と、奥側パッドがウエハ周縁に接触する位置とウエハ中心とを通る直線の下側にあって、ウエハに接触して周縁部を把持する下部手前側パッド6と、その直線の上側にあって、ウエハに接触して周縁部を把持する上部手前側パッド5とを有し、前記各パッドはウエハ周縁と接触する部分に凹部を有し、前記各パッドの少なくとも1つが動作してウエハを周縁部で把持する装置を提供する。
(もっと読む)
ロードポートおよびカセット位置調整方法
【課題】載置されたカセットを所定の取り出し基準位置に移動して整合させ、また、取り出し基準位置から元の載置位置に戻すことができるロードポート及びロードポートのカセット位置調整方法を提供する。
【解決手段】載置部30は、水平面上の所定の位置に設置された基盤ステージ31、カセット50を載置する平面を有したフローティングステージ32、及び位置調整機構33を備え、位置調整機構33は、カセット50のサイズに基づいて、予め設定されているx方向およびy方向の基盤ステージ31に対するカセット50のカセット基準位置に、フローティングステージ32とともにカセット50を移動させる位置移動を実行する。
(もっと読む)
搬送装置
【課題】加熱処理等がされたウエハを搬送する際に、ウエハ表面が大気にふれることでウエハ表面が酸化して、ウエハの品質が劣化することがある。
【解決手段】ウエハの搬送システム全体を不活性ガスで充満させることなく、エンドエフェクタ上部に載置されたウエハに対して局所的な不活性ガス雰囲気とする。これによりことで少量の不活性ガスでウエハ等の劣化を防止する。本発明の搬送システムに備えるウエハの搬送装置には、不活性ガスをウエハ表面に送風する送風装置を備えることで、ウエハと送風装置との隙間に不活性ガスの気体相を形成してウエハの酸化を防止することができる。
(もっと読む)
円盤状物の位置決め方法並びに、その方法を使用する円盤状物の位置決め装置、搬送装置および半導体製造設備
【課題】位置決め装置と搬送ロボットとを具える半導体製造装置における設備立ち上げ時の各ポートでの基準位置教示の時間短縮を目的とする。
【解決手段】ウエハ等の円盤状物47の円周と検出手段の軌跡43とが交わる2点W1、W2を検出し、この2点とこれらを結ぶ線分の垂直二等分線42上の特定点Oと円盤状物の半径rとを用いて円盤状物の中心位置Aを算出する。これにより搬送ロボットに位置決め作業をさせ、その結果を用いて搬送経路の修正ばかりでなく設備立ち上げの際の基準位置教示も大部分自動化できた。ノッチがある場合は、円盤状物の円周を検出手段の2本の軌跡で検出し、正しい中心位置を見いだす。またノッチを有する半径未知の円盤状物では、その円周を検出手段の、共にノッチに掛からない距離だけ互いに離間した3本の軌跡で検出して半径を求めることで、直径の異なるウエハを用いる混合生産も可能となった。
(もっと読む)
ロボット装置
【課題】 高い剛性を持ち、かつ旋回半径の小さい2アーム方式のロボット装置を提供すること。
【解決手段】 ロボット装置1は、円盤状の据付台2と、筐体3と、2本のアーム部10、20およびアーム部10、20の先端に設置されたハンド部材100、200とからなる。ハンド部材100、200は、2股に分かれたフォーク状の平板であり、液晶ガラス基板をこの2股に分かれた部分に載置可能である。大気雰囲気側となる円筒筐体3には制御基板が格納されている。
アーム部10、20は、同軸に配置されたハブ4、5、6上に設置されている。ハブ4、5、6は、同軸のインハブ型のモータが3段に連なった構成となっており、制御基板により旋回制御される。アーム部20は、アーム部10が前後進する際に、後退したままアーム部10に対して垂直方向に旋回する。
(もっと読む)
1 - 10 / 33
[ Back to top ]