
株式会社ニッセイにより出願された特許
1 - 10 / 17
磁気歯車装置
【課題】大きな伝達トルクを得ることができる磁気歯車装置を提供する。
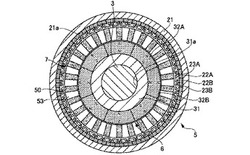
【解決手段】磁気歯車装置は、外歯車5と、内歯車6と、ステータ歯車7とを備えている。外歯車5は、外側筒21と、複数の第1外側磁石片22A,22Bと、複数の第2外側磁石片23A,23Bとを有している。内歯車6は、内側筒31と、複数の内側磁石片32A,32Bとを有している。ステータ歯車7は、外歯車5と内歯車6との間に配置される複数の磁性歯部53を有している。外歯車5の複数の第1外側磁石片22A,22Bは、異なる磁極が筒孔21aの周方向に隣り合うように並び、複数の第2外側磁石片23A,23Bは、同じ磁極が筒孔21aの周方向に隣り合うように並ぶ。これにより、複数の第1外側磁石片22A,22B及び複数の第2外側磁石片23A,23Bは、磁束が集中する磁束収束部25を形成する。
(もっと読む)
磁気歯車装置

【課題】複数の磁性歯部をそれぞれ独立した状態に形成し、磁石片の磁束を通す複数の磁性歯部の変形を防止することができる磁気歯車装置を提供する。
【解決手段】磁気歯車装置は、外歯車と、内歯車と、外歯車と内歯車との間に配置されるステータ歯車7とを備えている。ステータ歯車7は、外歯車の筒孔と同心円状に間隔をあけて並ぶ複数の磁性歯部53と、複数の磁性歯部53の間に設けられた複数の固定部50とを有する本体部41と、本体部41と接続するベース部47とを有する。
(もっと読む)
磁気歯車装置
【課題】磁石片の磁束を通す複数の磁性歯部の変形を防止することができる磁気歯車装置を提供する。
【解決手段】磁気歯車装置は、外歯車と、内歯車と、ステータ7歯車とを備えている。ステータ歯車7は、ベース部47と、複数の磁性歯部53と、内側環状部材42と、外側環状部材43とを有している。ベース部47は、筒孔の軸方向に直交する平面を有し、複数の磁性歯部53は、ベース部47の平面から略垂直に突出して筒孔と同心円上に所定の間隔をあけて並んでいる。内側環状部材42は、複数の磁性歯部53の先端部に内側から嵌合し、外側環状部材43は、複数の磁性歯部53の先端部に外側から嵌合する。
(もっと読む)
かご形誘導電動機の回転子の製造方法
【課題】 大きさを変えることなく従来よりも高効率のかご形誘導電動機を製造できるようにする。
【解決手段】 ロータコアを構成する電磁鋼板の積厚方向が上下方向になるようにロータコアをキャビティ(C1、C2)内に収める。0.05[m/sec]以上0.2[m/sec]以下の低速層流充填速度で液相の純アルミニウムを、キャビティ(C1、C2)の下方からキャビティ(C1、C2)内に供給する。キャビティ(C1、C2)内に収められているロータコア200に接触しているときのアルミニウムの温度を、630[℃]以上660[℃]以下にする。
(もっと読む)
磁気歯車装置
【課題】大きな伝達トルクを得ることができる磁気歯車装置を提供する。
【解決手段】磁気歯車装置1は、外歯車5と、内歯車6と、ステータ歯車7とを備えている。外歯車5は、外側筒21と、複数の外側磁石片22A,22Bとを有している。内歯車6は、内側筒31と、複数の第1内側磁石片32A,32Bと、複数の第2内側磁石片33A,33Bとを有している。ステータ歯車7は、外歯車5と内歯車6との間に配置される複数の磁性歯部53を有している。内歯車6の複数の第1内側磁石片32A,32Bは、異なる磁極が筒孔21aの周方向に隣り合うように並び、複数の第2内側磁石片33A,33Bは、同じ磁極が筒孔21aの周方向に隣り合うように並ぶ。これにより、複数の内側磁石片32A,32B,33A,33Bは、磁束が集中する磁束収束部を形成する。
(もっと読む)
太陽光利用パネル
【課題】クリーニングのために専用の駆動装置を搭載することなく、低コストでクリーニング機能を付与する。
【解決手段】ソーラーパネル1において、回転ブラシ28とフレーム6の受けロッド45との間に、パネル7,7の間で回転ブラシ28,28をフレーム6側へ連結する連結手段を設ける一方、支柱2と回転ブラシ28,28との間に、パネル7,7の水平姿勢で連結手段による回転ブラシ28,28とフレーム6との連結を解除する解除手段と、パネル7,7の水平姿勢で回転ブラシ28,28を支柱2側へ連結する第二の連結手段とを設けて、解除手段によって回転ブラシ28,28とフレーム6との連結を解除し、第二の連結手段によって回転ブラシ28,28を支柱2側へ連結した状態で、水平姿勢のパネル7,7を水平回転させることで、回転ブラシ28,28をパネル7,7上で相対的に旋回させて受光面を清掃可能とした。
(もっと読む)
磁気歯車装置
【課題】回転軸を介して軸受に作用する磁気吸引力を小さくすることができ、且つ、伝達トルクを確保することができる磁気歯車装置を提供する。
【解決手段】磁気歯車装置1は、複数の第1歯車5と、複数の磁石環6と、複数の第1歯車5及び複数の磁石環6が固定される第1の回転軸3と、複数の第2歯車7と、複数の第2歯車7が固定される第2の回転軸4を備えている。複数の第1歯車5は、磁性板の外周に複数の歯16を設けて形成され、歯幅方向に所定の間隔をあけて積層されている。複数の磁石環6は、複数の第1歯車5間に介在されている。複数の第2歯車7は、磁性板の外周に複数の歯を設けて形成され、歯幅方向に所定の間隔をあけて積層される。そして、複数の第1歯車5間に介在されることで第2歯車7の複数の歯19が第1歯車5の複数の歯16に非接触で重なり合う。
(もっと読む)
燃料電池発電システム
【課題】燃料電池発電システムにおける燃料電池の冷却と水素吸蔵合金タンクの排熱利用とを効果的に行うことを可能にする。
【解決手段】水素吸蔵合金タンク4と、水素吸蔵合金タンク4から供給される水素を消費する燃料電池3と、燃料電池3と水素吸蔵合金タンク4との間で熱伝達を行う熱伝達部材6と、水素吸蔵合金タンクおよび燃料電池の周辺温度を検知する温度センサ(温度測定端子14)と、燃料電池3側から水素吸蔵合金タンク4側に向けて送風するファン(吸気口ファン10、排気口ファン11)と、前記温度センサの検知結果を受け、検知温度の高低に基づいて前記ファンの送風動作を制御するファン制御部13を備え、温度の高低によってファンの動作を適切に制御して、燃料電池の冷却と、水素吸蔵合金タンクへの排熱伝達とを効果的かつ効率的に行うことができる。
(もっと読む)
画像を利用したセンサレスモータ駆動ロボット
【課題】ハンドの移動の開始からワークの把持、さらに移動、ワークの解放に至る一連のプロセスの中で、位置認識の必要度合いに応じて必要な手段を確保して、全体として多関節アームロボットの効率的な移動、動作の実現を図ることを目的とする。
【解決手段】アーム及び/又はハンドの駆動を外部センサによるフィードバック機構を有さないモータにより行い、かつ、少なくともワーク検索位置からワーク把持まで等の移動及び動作はステレオカメラで撮像したワーク等の画像と予めデータベースに保存されたワーク等のテンプレート画像とのマッチングによるワーク等検出に基づいて前記モータにより行うことを特徴とする。
(もっと読む)
燃料電池用セパレータ
【課題】セパレータを介する電極の冷却をより確実に行い、しかもセパレータのさらなる耐食性の向上を図る。
【解決手段】燃料電池用金属セパレータ10は、空冷される電池スタックに単位電池セルと共に積層されて使用され、アルミニウム系金属よりなるセパレータ基板1と、セパレータ基板1の表面に形成されたニッケル層2と、ニッケル層2の表面に形成された導電性樹脂層3と、導電性樹脂層3の表面に形成された撥水層4と、を備える。セパレータ基板1は、単位電池セルを構成するアノード及びカソードに対向して配置される反応部を有するセパレータ本体部11と、セパレータ本体部11の周縁の少なくとも一部に一体に形成されたヒートシンク部とを有する。
(もっと読む)
1 - 10 / 17
[ Back to top ]