
ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツングにより出願された特許
21 - 30 / 591
油圧式ブースト補償システムのための車両の真空センサにおけるエラー状態の高速検出
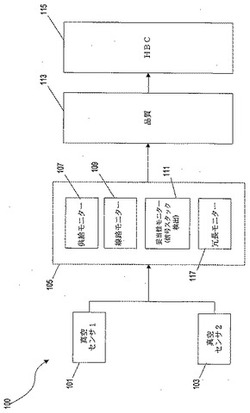
【課題】冗長センサを使用して、車両の制動システムにおけるエラー状態を検出するシステムおよび方法を提供すること。
【解決手段】エラー状態が制動システム内に存在するときを判定するための、制動システムの同じ真空室内の冗長真空センサを監視するシステムおよび方法。制動システムは、制動システムの室内に配置された第1のセンサと、同じ室内に配置された第2のセンサとを含む。第1の測定値が第1のセンサから受け、第2の測定値が第2のセンサから受ける。第1の測定値と第2の測定値との間の差が、判定される。第1の測定値と第2の測定値との間の差が、閾値より大きいときに、エラー状態が表示される。
(もっと読む)
積荷情報に基づいて重心補償を行う自動車動的制御システム

【課題】自動車を制御するための、方法、システム、および命令を含むコンピュータ読取可能媒体を提供すること。
【解決手段】1つのシステムは、複数のセンサ、乗員拘束システム、およびコントローラを含む。複数のセンサは、自動車の運転パラメータを検知するように構成され、乗員拘束システムは、自動車内に存在する積荷に関するデータを検知するように構成される。コントローラは、自動車内に存在する積荷に関するデータを取得し、積荷に関するデータに基づいて自動車の重心に対する積荷の影響を抑えるように制御調整量を決定し、制御調整量に基づいて自動車を制御するように構成される。
(もっと読む)
最適エンジン制御設定を確定するためにエンジン性能測定値を摂動させること
【課題】車両エンジンの性能を最適化するための方法およびシステムを提供すること。
【解決手段】方法は、第1のエンジン制御パラメータに対する初期値を、車両エンジンの1つまたは複数の検出された動作条件に基づいて確定するステップと、エンジン性能変数の値を確定するステップと、エンジン性能変数の確定値を人為的に摂動させるステップとを含む。次いで、第1のエンジン制御パラメータに対する初期値が、摂動されたエンジン性能変数に基づいて調整され、エンジン性能変数が目標のエンジン性能変数に近づけられる。車両エンジンの動作が、第1のエンジン制御パラメータに対する調整された初期値に基づいて制御される。これらの活動が、エンジン性能変数が目標のエンジン性能変数に接近するまで繰り返される。
(もっと読む)
特にハイブリッド車両で内燃機関をスタータなしに始動するための方法および装置
【課題】内燃機関、特に内燃機関をスタータなしに始動するための方法において、引きずりトルクなしに内燃機関を始動することができ、付加的な減圧弁を設ける必要がない方法を提供する。
【解決手段】特にハイブリッド駆動系(1)で、内燃機関(2)をスタータなしに始動するための方法であって、内燃機関(2)のシリンダ(21)の一部が減圧可能なシリンダとして構成されており、シリンダが圧縮行程で減圧可能である方法は、内燃機関(2)の停止時に:クランクシャフト(25)の最終位置を調節し、停止時の最終位置で減圧可能なシリンダを圧縮行程に位置させるステップと;内燃機関(2)の停止に続いて始動プロセスが要求された場合に:静止状態で燃焼サイクルに位置する内燃機関(2)のシリンダ(21)内で空気・燃料混合物を点火し、内燃機関(2)を始動するためのトルクを生成し、圧縮行程に位置する減圧可能なシリンダを減圧するステップとを含む。
(もっと読む)
内燃機関によって駆動される自動車用電気機器の運転方法
【課題】停止過程の間の内燃機関の挙動を改善する、内燃機関によって駆動される自動車用電気機器(10)の運転方法を提供する。
【解決手段】内燃機関(1)の停止のために燃料供給が中断される、内燃機関によって駆動される自動車用電気機器(10)の運転方法において、燃料供給の中断の後及び内燃機関の停止過程の間に、電気機器(10)が出力側で少なくとも一時に短絡される。
(もっと読む)
音叉ジャイロスコープ装置を有する2軸ヨーレート検知ユニット
【課題】単一の機械的な共振構造で構成できる、2軸ヨーレート検知ユニットを提供する。
【解決手段】反対に位置する2つの対を成して同一平面上に配置される4つの開放端音叉F1、F2、F3、F4を含み、第1の対の開放端音叉は第1の軸に沿って互いに反対の位置に配置され、第2の対の開放端音叉は第2の軸に沿って互いに反対の位置に配置され、第1の軸及び第2の軸は互いに対して垂直である。4つの開放端音叉は、4つの開放端音叉が全て周波数及び位相に関して同じように振動するように、機械的に互いに結合される。
(もっと読む)
SOI基板を持つマイクロ電気機械システム用アンカー及びその製造方法
【課題】機械構造及びこれらの機械構造を基板に固定するためのアンカーを含むMEMS装置及びその製造技術を提供する。
【解決手段】アンカー30a、30b、30cは、機械構造20a、20b、20cの解放プロセスによる影響を比較的受け難い材料で形成される。エッチング解放プロセスは、機械構造20a、20b、20cをアンカー30a、30b、30cを構成する材料に固定する材料に対し、選択的又は優先的である。更に、アンカー30a、30b、30cは、絶縁層の除去が機械構造20a、20b、20cの基板14に対する固定にほとんど又は全く影響を及ぼさないように基板14に固定される。
(もっと読む)
車両の駐車ブレーキを調節するための方法
【課題】電気機械式の駐車ブレーキの電動ブレーキモータがクランプ力を減衰するために進む必要がある解除距離を簡単な手段により回転数信号を使用することなしに高精度で調節する。
【解決手段】電動ブレーキモータ3によって電気機械的な締付け力を生成する電気機械式のブレーキ装置を備える駐車ブレーキ1を調節するための方法において、電動ブレーキモータ3を解除方向に変位するための解除所要時間を、電動ブレーキモータ3を、以前に係止方向に変位された係止所要時間から決定する
(もっと読む)
流体を制御するための弁
【課題】閉鎖体に向けて加えられる横方向力によって流体を制御するための弁において、閉鎖体が揺動し、弁座に当接することを防止する。
【解決手段】弁座(3)および閉鎖体(2)が回転対称的な領域(21,31)を備え、領域(21,31)で弁座(3)と閉鎖体(2)との間に密閉線が形成され、弁座(3)および/または閉鎖体(2)が、非回転対称的な領域(22,32)を備え、領域(22,23)が、弁の貫流方向(A)に回転対称的な領域(21,31)に接続しているようにした。
(もっと読む)
ラムダセンサの電気加熱のための制御方法及び装置
【課題】 内燃機関の排気ガスシステム内に配置されているセンサの過熱が避けられるように、センサの電気的加熱のための制御方法および装置を提供する。
【解決手段】 内燃機関の排気ガスシステム内に配置されているセンサの電気的加熱のための制御方法において、センサの全加熱出力(42)が制御され、且つセンサの温度の実際値(33)が特性パラメータ、例えば抵抗の測定によって決定される。定格加熱出力(41)が、特性マップ(20)を介して内燃機関の運転ポイント(30、31)に応じて決定される。制御加熱出力(40)が、制御器(10)において温度の実際値(33)と新しい目標値(34)とから決定される。全加熱出力(42)が、定格加熱出力(41)と制御加熱出力(40)との和として生成される。
(もっと読む)
21 - 30 / 591
[ Back to top ]