
株式会社エクォス・リサーチにより出願された特許
1,001 - 1,010 / 1,360
車両
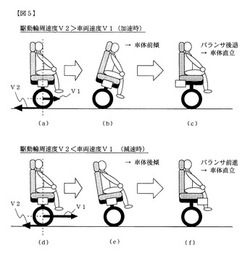
【課題】駆動輪のスリップ状態においても安定的に姿勢制御を行う。
【解決手段】車両の走行時において、駆動輪がスリップしているか否かを常時監視しておき、スリップが検出された場合には、駆動輪による通常の姿勢制御を切り離しスリップ状態用の姿勢制御を行う。すなわち、車両の前後方向に移動可能なバランサ(重量体)を配置し、スリップによって車両が前傾した場合にはバランサを後方に移動し、後傾した場合にはバランサを前方に移動することで姿勢制御を行う。スリップの検出は、駆動輪の接地周速度V2と、車両の走行速度V1を比較することでスリップ状態か否かを判定する。
(もっと読む)
車両用駆動制御装置

【課題】動力源のトルクを検出するセンサを設けることなく、左右車輪を独立に駆動する動力源の特性差・劣化の検出を行う。
【解決手段】車両用駆動制御装置に、車両が直進走行状態にあるかどうかを判定する直進走行状態判定手段(S102)と、該車両が駆動状態か非駆動状態かを判定する駆動状態判定手段と、ドライバーの操舵入力を検出する操舵入力検出手段と、車両が直進走行状態にあると判定された場合で、車両が駆動状態にあると判定されたときの操舵入力検出手段による検出結果を記憶する駆動状態記憶手段(S105)と、車両が直進走行状態にあると判定された場合で、車両が非駆動状態にあると判定されたときの操舵入力検出手段による検出結果を記憶する非駆動状態記憶手段(S109)と、駆動状態記憶手段と非駆動状態記憶手段とに基づいて異常判定を行う異常判定手段(S106)と、を備える。
(もっと読む)
車両
【課題】より少ない制限量(大きな制限値)で旋回する。
【解決手段】車両全体の重心位置を推定し、その重心位置に応じた限界横方向加速度alim(=aMin、aMax)を求め、搭乗者が要求する目標走行状態(V*、γ*)から求めた横方向加速度a*が、限界横方向加速度alimを超えない範囲で旋回走行を行う。すなわち、限界横方向加速度alimを超えない目標走行状態(V*、γ*)が搭乗者によって入力(要求)された場合には、その目標走行状態で旋回走行する。一方、限界横方向加速度alimを超える目標走行状態(V*、γ*)が入力された場合には、横方向加速度a*=限界横方向加速度alimとなるように、理想目標走行状態(V*、γ*)を現実目標走行状態(V*〜、γ*〜)に制限する。これにより、旋回速度と旋回曲率を必要以上に制限しないので、車両の旋回性能を限界まで最大限利用することができる。
(もっと読む)
燃料電池スタック
【課題】積層方向に関する中央部付近に配設された単位セルの放熱性を端部付近よりも高めることによって、積層方向に関する寸法が増加することなく、大きな設置スペースを必要とすることなく、積層方向に関して温度を均一化させることができ、各単位セルの寿命を長くすることができるようにする。
【解決手段】電解質層を燃料極と酸素極とで挟持した燃料電池がセパレータユニットを挟んで積層され、積層方向に関する中央部付近における燃料電池の放熱性が端部付近における燃料電池の放熱性よりも高くなるように構成されている。
(もっと読む)
運転者状態推定装置及び運転支援装置
【課題】生体情報が正常に測定できない場合であっても、生体情報に基づいた運転者の状態の推定を行う。
【解決手段】ドライバの生体情報を計測し、正常に生体情報が計測できている場合には、計測した生体情報からドライバの状態(正常状態、覚醒度低下等)を推定する。一方、推定したドライバの状態に対応して、正常に生体情報を計測した際の運転状況(車両情報と環境情報)を蓄積することで、生体情報に基づくドライバ状態を運転状況から推定するドライバモデルを構築しておく。ドライバの生体情報の検出が正常である場合には、計測した生体情報に基づいて現在のドライバの状態を推定し、正常でない場合には、ドライバモデルを使用して現在の運転状況からドライバの状態を推定する。
(もっと読む)
燃料電池システム
【課題】1つの燃料電池における燃料流路を並列な複数の小流路に分割し、各小流路に対応する流量制御弁によって各小流路を流れる燃料ガスの流量を制御するようにして、燃料電池の各部における燃料極側の湿潤状態を均一にし、燃料流路内における水分の凝縮を防止し、燃料流路内の水分の滞留を抑制し、滞留した水分を速やかに排出することができ、燃料電池の性能低下及び燃料極の劣化を確実に防止することができるようにする。
【解決手段】電解質層を燃料極と酸素極とで挟持した燃料電池が、燃料極に沿って燃料流路が形成され、酸素極に沿って酸化剤流路が形成されたセパレータを介して複数電気的に接続された燃料電池集合体と、前記燃料流路に接続された燃料用管路系とを有する燃料電池システムであって、前記燃料流路は、並列な複数の小流路に分割され、前記燃料用管路系は、各小流路に対応し、各小流路を流れる燃料ガスの流量を制御する流量制御弁を備える。
(もっと読む)
走行車両
【課題】 車両のバランスを制御するバランサが故障した場合でも車両の走行や制動を安定に制御する走行車両を提供する。
【解決手段】 車体2と、車体2に回転可能に支持された車輪8と、車輪8を駆動する駆動手段7と、を有する走行車両1において、車体2の姿勢を検出する車体姿勢検出手段21と、錘14を移動させることで車体2の姿勢を制御するバランサ10と、車体姿勢検出手段21の検出した車体姿勢に基づきバランサ10を制御する車体姿勢制御手段22と、を備え、車体姿勢制御手段22は、バランサ10が故障した場合、駆動手段7のみで車体2の姿勢を制御する。
(もっと読む)
衝突時衝撃軽減装置及び車両
【課題】他車両による後方からの追突時に確実に乗員の安全を確保できる衝突時衝撃軽減装置及びその衝突時衝撃軽減装置を備えた車両を提供すること。
【解決手段】本発明の衝突時衝撃軽減装置及び車両によれば、他車両進行方向取得手段により取得された進行方向と他車両速度取得手段により取得された他車両の速度とに基づいて、他車両の移動可能な範囲が推定されるので、加速手段による加速を適切なタイミングで実行することができる。よって、衝突の際に自車両が他車両から受ける衝突エネルギーを確実に軽減することができるので、乗員の安全を確実に確保できる。
(もっと読む)
電動車両駆動制御装置
【課題】バッテリの寿命を長くすることができ、耐久性を向上させることができるようにする。
【解決手段】電動機械と、第1の電源と、エネルギー密度が低く、残量が高い領域で入力密度が高く、残量が低い領域で出力密度が高い特性を有する第2の電源と、第1、第2の電源の残量を検出する第1、第2の残量検出部と、電動車両の加速指標を検出する加速指標検出部と、電動車両の減速指標を検出する減速指標検出部と、電動車両の要求入出力を算出する要求入出力算出処理手段と、第1の電源の残量を判定する第1の残量判定処理手段と、第2の電源の残量を判定する第2の残量判定処理手段と、第2の電源に対する電力の入出力を第1の電源に対する入出力より優先して行う入出力制御処理手段とを有する。
(もっと読む)
車両
【課題】より少ない制限量(大きな制限値)で旋回する。
【解決手段】車両全体の重心位置を推定し、その重心位置に応じた限界横方向加速度alim(=aMin、aMax)を求め、搭乗者が要求する目標走行状態(V*、γ*)から求めた横方向加速度a*が、限界横方向加速度alimを超えない範囲で旋回走行を行う。すなわち、限界横方向加速度alimを超えない目標走行状態(V*、γ*)が搭乗者によって入力(要求)された場合には、その目標走行状態で旋回走行する。一方、限界横方向加速度alimを超える目標走行状態(V*、γ*)が入力された場合には、横方向加速度a*=限界横方向加速度alimとなるように、理想目標走行状態(V*、γ*)を現実目標走行状態(V*〜、γ*〜)に制限する。これにより、旋回速度と旋回曲率を必要以上に制限しないので、車両の旋回性能を限界まで最大限利用することができる。
(もっと読む)
1,001 - 1,010 / 1,360
[ Back to top ]