
株式会社エクォス・リサーチにより出願された特許
71 - 80 / 1,360
電力伝送システム
【課題】受電コイルが冷却され、受電コイルの発熱が蓄積されることなく、電力伝送効率低下を抑制な電力伝送システムを提供する。
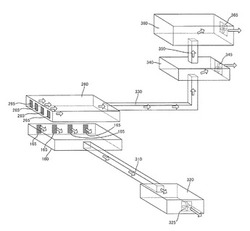
【解決手段】本発明の電力伝送システムは、電磁場を介して電力を受電する受電コイルと、前記受電コイルが収容されると共に、通風口265を有するコイルケース260と、前記受電コイルが受電した電力が充電されるバッテリーと、前記バッテリーが収容されるバッテリーケース360と、前記バッテリーケースを所定圧に保つバッテリーケース360と、前記受電コイルが受電した電力を前記バッテリーに充電可能な電力に変換する回路と、前記回路が収容される受電側回路ケース340と、前記受電側回路ケース340を所定圧に保つ受電側回路ケースファン345と、前記コイルケース260と前記受電側回路ケース340と接続する受電側第1ダクト330と、前記受電側回路ケース340と前記バッテリーケース360とを接続する受電側第2ダクト350と、を有することを特徴とする。
(もっと読む)
車両および車両制御プログラム

【課題】操舵支援を行いながら、走行経路に沿って滑らかに車両を走行させることができる車両および車両制御プログラムを提供すること。
【解決手段】推奨軌道に沿って車両1が走行するためのハンドル13の推奨ハンドル角φiを定め、実際のハンドル角φjと推奨ハンドル角φiとの差の絶対値が大きいほど、大きな補助力Fを、ハンドル13に対して、ハンドル角が推奨ハンドル角φiへ近づく方向に付与する。これにより、搭乗者は、ハンドル13を回転操作させなくても、ハンドル13に対して付与される補助力Fの方向および大きさから、推奨ハンドル角φiへと近づけるためにハンドル13を操作すべき方向やハンドルの操作量を容易に把握できる。
(もっと読む)
車両および車両制御プログラム
【課題】搭乗者の進行したい方向を正確に汲み取りながら走行予定軌道を選択して自動走行を行うことができる車両および車両制御プログラムを提供すること。
【解決手段】第3車両位置予測処理(S107)によって、ステアリングホイール13の回転角速度Δδを取得してステアリングホイール13の操舵角を算出し、そのステアリングホイール13の操舵角から前輪2FL,2FRへ付与される操舵角を算出して、その前輪2FL,2FRへ付与される操舵角と車両速度とに基づいて車両1のヨーレートを推定し、その推定したヨーレートから所定時間後の車両位置を予測する。これにより、搭乗者の進行したい方向を、所定時間後の車両位置まで特定して把握しているので、予測された車両位置に基づいて走行軌道を選択することによって、搭乗者の進行した方向を正確に汲み取りながら走行予定軌道を選択して、自動走行を行うことができる。
(もっと読む)
車両用制御装置
【課題】車輪のキャンバ角を調整するときのアクチュエータを負荷に適した短い動作時間で駆動できる車両用制御装置を提供すること。
【解決手段】指標取得手段S43によりアクチュエータに供給される電力に関する指標が取得され、その指標が、アクチュエータの動作時間を所定の動作時間内にするために必要な電力に対応する所定値より小さいか指標判断手段S44により判断される。判断の結果、指標が所定値より小さい場合に、アクチュエータの動作時間が短くなるように、電力調整手段S45によりアクチュエータに供給される電力が調整される。これにより、路面の状態や車両1の走行速度等により車輪2のキャンバ角を調整するときのアクチュエータの負荷が変化しても、負荷に適した短い動作時間でアクチュエータを駆動できる。
(もっと読む)
電力伝送システム
【課題】電力伝送時の最適な周波数を決定することができ、効率的な電力伝送を行うことが可能な電力伝送システムを提供する。
【解決手段】本発明の電力伝送システムは、直流電圧を所定の周波数の交流電圧に変換して出力するインバータ部130と、前記インバータ部130からの交流電圧が入力される送電アンテナ140と、前記インバータ部130によって出力される交流電圧の周波数を制御する送電制御部150と、を有し、前記送電アンテナ140から対向する受電アンテナに対して、電磁場を介して電気エネルギーを伝送する電力伝送システムであって、前記送電制御部150は、負荷側からみてアンテナ部が定電圧源として見える周波数を選定して電力伝送を行うように制御することを特徴とする。
(もっと読む)
車両および車両制御プログラム
【課題】自車両の走行を自動で制御しつつ、搭乗者の意思に沿って走行経路を決定できる車両および車両制御プログラムを提供すること。
【解決手段】車両1が、予め設定された走行軌道に沿って自動走行を行っている場合に、搭乗者がジョイスティック13を傾斜操作すると、走行制御装置100は、その傾斜方向(操作角度δ)に基づいて進行すべき道路を選択し、その道路へ進入するための走行軌道を走行軌道メモリ93bに格納する。これにより、搭乗者の意思に基づいて指示された車両1の進行すべき方向に基づいて走行軌道が設定され、その走行軌道に沿って車両1の走行を制御できる。よって、自車両の走行を自動で制御しつつ、搭乗者の意思に沿って走行軌道を決定できる。
(もっと読む)
車両および車両制御プログラム
【課題】搭乗者が指示した方向に車両を自動で走行させつつ、搭乗者の指示に基づいて走行経路が選択されたタイミングとその選択された走行経路とを搭乗者に確実に把握させることができる車両および車両制御プログラムを提供すること。
【解決手段】走行制御装置100は、搭乗者により傾倒操作されたジョイスティック装置13の操作レバー13aの傾倒方向から、搭乗者が希望する車両1の進行すべき方向を判断し、車両1を進行させる走行軌道を設定する。そして、走行軌道が設定された直後、操作レバー13aを傾倒させ、その傾倒方向を、設定された走行軌道によって車両1が進行していく方向にする。これにより、搭乗者は、操作レバー13aの動きにより、指示によって走行軌道が選択されて設定されたこと、及び、選択された走行軌道によって車両1が進む方向を、確実に把握することができる。
(もっと読む)
車両および車両制御プログラム
【課題】搭乗者の進行したい方向を正確に汲み取りながら走行予定軌道を選択して自動走行を行うことができる車両および車両制御プログラムを提供すること。
【解決手段】車両の搭乗者による回転操作によって車両の操舵方向が指示されるステアリングホイール13が設けられており、新たな走行軌道を選択して設定すべき判定エリアに車両1が位置した場合は、搭乗者によるステアリングホイール13の回転操作に基づいて、車両1が操舵され(S5)、その車両1の操舵に基づいて実際に車両1に発生したヨーレートを用いて所定時間後の車両位置を第1車両位置予測処理(S7)により予測する。これにより、車両1が走行している路面の傾きに左右されることなく、搭乗者の進行したい方向を正確に把握できる。よって、搭乗者の進行したい方向を正確に汲み取りながら走行軌道を選択して自動走行を行うことができる。
(もっと読む)
車両用制御装置
【課題】車輪のキャンバ角を調整するときの消費電力を抑制できる車両用制御装置を提供すること。
【解決手段】車輪のキャンバ角を調整するアクチュエータを備えた車両に用いられるものであり、指標取得手段S63によりアクチュエータに供給される電力に関する指標が取得され、その指標が所定値より大きいか指標判断手段S64により判断される。判断の結果、指標が所定値より大きい場合に、電力調整手段S65によりアクチュエータに供給される電力が小さくなるように調整され、キャンバ角調整手段S66により車輪2のキャンバ角が調整される。これにより、路面の状態や車両の走行速度等により車輪2のキャンバ角を調整するときのアクチュエータの負荷が変動しても、アクチュエータの消費電力を抑制できる。
(もっと読む)
熱電コージェネレーションシステム
【課題】太陽エネルギーを電気エネルギーに安定させて変換することができるようにする。
【解決手段】太陽光を集める集光部31と、集光部31によって集められた太陽光を熱に変換し、変換した熱を集める集熱部32と、集熱部32によって集められた熱を受けて吸熱反応を起こし、反応媒体を生成し、反応媒体が供給されて発熱反応を起こし、熱を発生させる反応器33と、反応器33において発生させられた熱を受け、高温部Hpと低温部Lpとの温度差に応じて電流を発生させる熱電変換部13と、反応器33において生成された反応媒体を反応器33から排出し、排出した反応媒体を反応器33に供給するための反応媒体給排装置とを有する。生成された反応媒体が反応器33から排出され、反応媒体が反応器33に供給されるので、反応器33の温度を調整することができる。
(もっと読む)
71 - 80 / 1,360
[ Back to top ]