
株式会社KECにより出願された特許
1 - 9 / 9
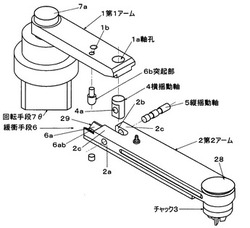
ロボットアーム
【課題】 比較的簡素な構造で緩衝作用が得られる構造を備えるロボットアームの提供。
【解決手段】 XθZ駆動方式ロボットのロボットアームにおいて、θ軸回転手段7で旋回する第1アーム1と、当該第1アーム1の先端部に連結し上下左右に揺動可能な第2アーム2を備えてなり、当該第2アーム2の先端部に作業部を備え、前記第1アーム1の先端部に横揺動軸4を支持し、当該横揺動軸4に前記第2アーム2の基部が支持する縦揺動軸5を支持し、前記第1アーム1と第2アームとの間に緩衝手段6を備え、当該緩衝手段6は、第2アーム2を第1アーム1に対する定常姿勢へ誘導する姿勢維持手段と、第2アーム2を第1アーム1に対する定常姿勢から第2アーム2の先端部を左右及び上方へ誘導可能な退避手段を備えるロボットアーム。
(もっと読む)
ワイヤ駆動式ロボット

【課題】 駆動源を可動部に搭載することなく複数方向への移動に対して正確で且つ迅速な制御を行い得る小型のワイヤ駆動式ロボットの提供。
【解決手段】 XθZ駆動方式のワイヤ駆動式ロボットにおいて、ロボットアームを旋回させるθ回転手段を備える昇降ベースと、昇降ベースの昇降軌道をZ軸方向に規制する昇降ガイドと、昇降ガイドを支持する走行ベースと、走行ベースの走行軌道をZ軸と直角なX軸方向に規制する走行ガイドと、走行ガイドを支持するベースフレームと、昇降ベースにZ軸方向への駆動力を与えるワイヤ駆動方式のZ軸駆動手段と、走行ベースにX軸方向への駆動力を与えるワイヤ駆動方式のX軸駆動手段と、
からなり、Z軸駆動手段及びX軸駆動手段の昇降駆動源及び走行駆動源をベースフレームに備えることを特徴とするワイヤ駆動式ロボット。
(もっと読む)
タップ及びコンセント
【課題】 比較的簡素な小型の構造で待機電源の維持を要する機器と、待機電源の維持を要しない機器を、異なる回路に接続することが可能であり、且つ待機電源の維持を要しない機器への電力供給を一括遮断することができるタップ及びコンセントの提供。
【解決手段】 複数のソケット1を備える単相二線式電源系統のタップであって、単相二線式電源系統のソケット1に接続する電源プラグを備え、前記電源プラグを介して接続する二線のうちの一本に繋がる共用回路2aを備え、前記電源プラグを介して接続する二線のうちの他の一本から二つに分岐した二つの選択回路2b,2cを備え、各ソケット1に、共用回路2aに接続した単一の共用端子4aと、各選択回路2b,2cに各々接続した二つの選択端子4b,4cを備え、各ソケット1の端子は、共用端子4aを中央に配置し、その左右両側に選択端子4b,4cを配置し、各端子の間隔を、電源プラグが備える一対の接続刃の間隔に等しく設定したことを特徴とする。
(もっと読む)
自動機による位置出し方法及び自動機の位置出し装置
【課題】 安価で正確且つ迅速に位置出しを行なうことができる自動機による位置出し方法及び自動機の位置出し装置の提供。
【解決手段】 X軸方向へ移動し、且つθ方向へ旋回するアーム1と、当該アーム1の旋回面に対して平行であり、且つ略平坦な作業テーブル2を備え、アーム1の先端部に作業テーブル2へ向けたチャック3を回転自在に支持した自動機による位置出し方法において、アーム1の先端部に作業テーブル2又は作業テーブル2上の物体の表面の高低を検出するセンサ4を支持し、作業テーブル2又は作業テーブル2上の物体におけるターゲットポイントに球面状ゲージ5を載せ、センサ4で作業テーブル2又は作業テーブル2上の物体のターゲットエリアをX軸方向への移動とθ方向への旋回で走査し、センサ4から得た検出信号の変化を以って球面状ゲージ5の頂部を検出し、当該頂部の位置座標を保存する自動機による位置出し方法。
(もっと読む)
チャック及びロボットハンド
【課題】比較的簡素で、且つ軽量な構造で多様なワークの保持等に対応できるロボットハンド及びチャックの提供すること。
【解決手段】チャックホルダ1、操作ロッド2、及びチャック爪3からなり、チャックホルダ1は、ワークの保持開放機能を満足すべくチャック爪3が揺動自在に収まる切り込み7と、チャック爪3の基部3b背面を支持する揺動支点を備え、操作ロッド2は、その先端部に側方へ突出した加圧部8を備え、チャックホルダ1の中空部に、操作ロッド2を進退可能に挿通し、操作ロッドの加圧部8とチャックホルダ1の揺動支点で、複数のチャック爪3の基部3bを挟持し、各チャック爪3の基部3bの内面に、操作ロッド2の進退に伴う加圧部8の進退量を、各チャック爪3の遠心及び向心方向への揺動量に変換するカム部9を備えるチャック。
(もっと読む)
製造装置、製造装置の制御システム、製造装置の制御方法
【課題】外乱による影響を受けることなく、また、外部へ電磁的なノイズを放出することなく、省スペースかつ省電力にて、製造装置における無線による制御情報の伝達を実現する。
【解決手段】台座2a、ロボットアーム2b、関節2cおよびロボットハンド5を備えたロボット2において、ロボットハンド5に、無線スレーブ3および当該無線スレーブ3およびロボットハンド5に電力を供給する電力供給2次側部4を搭載するとともに、無線スレーブ3に無線電波7cでロボットハンド5の制御指令を与える無線マスタ7を含むロボット2の作業空間を、無線シールド機能を有するカバー1で覆い、カバー1の外部近傍には、非シールド部1aを通じて電力供給2次側部4に非接触で電力を供給する電力供給1次側部8を配置した。
(もっと読む)
作業管理システム
【課題】 能動的な誘導を介すことなく正確な作業を実現できる作業管理システムの提供。
【解決手段】 作業位置及び作業順序の情報を備え工具の次作業位置を出力する作業管理手段と、前記相対角度と各アームの有効長に基いて、工具位置の水平位置を導くと共に、工具位置の垂直位置を導く工具位置検出手段と、当該工具位置検出手段により検出した前後の位置変化に基いて、前記工具の移動方向を導く移動方向検出手段と、前記工具位置を起点とする前記次作業位置の方向を導く目的方向検出手段と、前記工具の移動方向と前記次作業位置への方向との比較により当該工具の次作業位置への近接状況を判定する操作方向判定手段と、前記近接状況が近接傾向にある場合には各連結部のブレーキを解除し、前記近接状況が離隔傾向にある場合には各連結部のブレーキを作動させる抵抗調整手段を備える作業管理システム。
(もっと読む)
軸状物用包装装置
【課題】正方形の縦長の内ケース1を上向きに、外ケース3を下向きに、軸状物5を立てて供給し、内ケースを保持しつつ軸状物を投入し、外ケースを被せる軸状物用包装装置において、内・外ケースに多少の成形誤差があっても、嵌め合わせを容易に行うこと。
【解決手段】 包装機本体は、内ケースの下部を収めるポケット12をテーブル10に備え、内ケースを挟持するクランプ13を水平方向に段階的に開閉可能とし、一対の爪21を水平方向に対向し、両爪を対向方向に接近・隔離する開閉手段15を備え、各爪の対向面に平面視V字状の拘束面23を備え、両爪の内側に平面視正方形の対向する二隅を作り、平面視正方形の大きさを両爪の開閉動作で可変し、両爪の拘束面を、下部に比べて上部を広い段差形状とし、拘束面の上端部には上に向かって広くなる勾配の上ガイド24を付け、拘束面の上部と下部の境目には下に向かって狭くなる勾配の下ガイド25を付ける。
(もっと読む)
二次電池の充電方法及び装置
【課題】二次電池全体の最大許容容量まで充電すること、過充電のセルを満充電電圧まで放電すること。
【解決手段】 直列接続の二次電池のセルに初期定電流を流す定充電工程と、セル電圧が過充電限界電圧V2に該当すると充電電流を減らす手順を繰返す多段充電工程とを順次行い、セル電圧が満充電電圧に該当すると充電電流を該当セルに並列接続された放電抵抗R1にも流す容量調整工程を設ける二次電池の充電方法において、多段充電工程でセルへの充電電流が設定電流Imin+αになると満充電促進工程に移り、容量調整工程を行いつつ満充電電圧を放電抵抗で割った満充電促進電流Iminでセルを充電する。設定時間経過後に満充電促進工程を終了して微調整工程に移り、容量調整工程を行いつつ充電停止し、満充電電圧以上のセルを放電し、満充電復帰電圧にまで低下すると放電を停止する。
(もっと読む)
1 - 9 / 9
[ Back to top ]