
株式会社シンテックホズミにより出願された特許
1 - 8 / 8
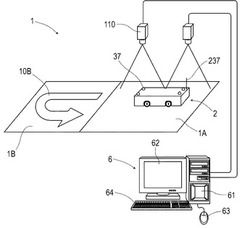
自動搬送システム
【課題】コストを抑制しつつ、走行経路の変更要求に柔軟に対応できる自動搬送システムを提供すること。
【解決手段】操舵可能な駆動輪を含む駆動ユニット、及び駆動ユニットを制御する制御ユニットを備えた自動搬送車2と、自動搬送車2の位置を検知する位置検知手段と、を備え、予定された経路に沿って自動搬送車2を移動させる自動搬送システム1では、自動搬送車2が移動するエリアとして、位置検知手段による検知位置を利用して自動搬送車2が制御される誘導走行エリア1A、及び自動搬送車2の位置が検知されないエリアであって検知位置を利用することなく自動搬送車2が制御される自律走行エリア1Bが設定されている。
(もっと読む)
自動搬送車の制御方法

【課題】自動搬送車を横行又は斜行させた後、新たな導線への追従状態に移行するための制御方法であって、新たな導線に円滑に乗り移ることで、追従状態への移行に要する時間を短縮可能な自動搬送車の制御方法を提供すること。
【解決手段】自動搬送車2が横行でガイドライン12へ接近して乗り移るための制御方法は、駆動ユニット3をガイドライン12に接近させる第1の走行ステップと、ラインセンサ351がガイドライン12を検出した後、再びガイドライン12を検出しなくなるまで駆動ユニット3をそのまま前進させる第2の走行ステップと、第2の走行ステップの後、ラインセンサ351によりガイドライン12を再検出できるように駆動ユニット3を操舵する第3の走行ステップと、ラインセンサ351によるガイドライン12の再検出に応じて追従走行制御への切換を実行する移行ステップと、を含んでいる。
(もっと読む)
自動搬送システム
【課題】導線によらない自律走行区間を含む自動搬送システムにおいて、シンプルなシステム構成によりコストを抑えたシステムを提供すること。
【解決手段】自動搬送システム1は、自動搬送車2が追従可能なガイドライン11、12が経路に沿って敷設された第1及び第2の追従区間と、第1の追従区間と第2の追従区間との間に配置され、自動搬送車2が自律走行する自律走行区間と、自律走行区間の自動搬送車2を第2の追従区間のガイドライン12に復帰させるための復帰パターン100が敷設された復帰走行区間と、を含み、自動搬送車2は、復帰パターン100の外縁101が検出されたときに追従走行制御に切り換えられる。
(もっと読む)
自動搬送車、及び自動搬送車の連結方法
【課題】搬送台車に対して牽引車を確実性高く連結できる優れた特性の自動搬送車、及びその連結方法を提供すること。
【解決手段】自動搬送車の連結方法においては、連結ピン41の突出が規制された状態でガイドレール13に沿って牽引車2を移動させる第1の移動ステップと、連結ピン41が係合プレート15に対面する対面状態であるか否かを判定する状態判定ステップと、対面状態と判定されたときに、連結ピン41が突出するように規制を解除する突出ステップと、連結ピン41の先端が係合プレート15に当接する状態を維持しながら、牽引車をさらに移動させる第2の移動ステップと、を実行して、搬送台車10に牽引車2を連結する。
(もっと読む)
自動搬送車
【課題】小型、低コストであって、連結時の位置制御が容易な優れた特性の自動搬送車を提供すること。
【解決手段】牽引車2を連結するための1箇所の係合孔150と、牽引車2の側面202に対面するガイドレール13と、を有する搬送台車10と、係合孔150に連結される連結ピン41と、牽引車2の向きと搬送台車10の向きとのずれを規制できるよう、ガイドレール13と対面するように側面202に配設されたローラ210と、を有する牽引車2と、の組み合わせによる自動搬送車1は、前後方向に移動する際には、連結ピン41から係合孔150に作用する前後方向の力に応じて搬送台車10が前後方向に牽引される一方、左右方向に移動する際には、ローラ210からガイドレール13に作用する左右方向の力に応じて搬送台車10が左右方向に牽引される。
(もっと読む)
駆動ユニット方向検出システム
【課題】各電動装置への電力供給をオフからオンとした場合であっても、駆動ユニットの車体に対する向きを直ぐに判定できるようにすることにある。
【解決手段】駆動ユニット22の車体に対する回転角度値を360度までの範囲で検出する単回転検出用ロータリーエンコーダと、駆動ユニット22の車体に対する360度回転及び回転方向をメカニカル的に検出する360度単位回転数検出機構と、360度単位回転数検出機構による360度回転及び回転方向の検出に基づき回転情報テーブル根拠情報を更新して格納しておくデータ格納装置29,39と、回転情報テーブル根拠情報と回転角度値とから駆動ユニット22の車体に対する向きを導出する主制御回路40とを備える。ここで、データ格納装置29,39は、各電動装置への電力供給がオフとなる状態でも、独立系統の電源から電力が供給されて機能状態が維持されている。
(もっと読む)
自動搬送車
【課題】荷物を積載して自動走行する自動搬送車において、旋回走行させる際のスペースを狭くすることができ、かつ走行時間の短縮化を図ることにある。
【解決手段】荷物を積載する荷台を具備する車体11と、車体11下側の前位置および後位置のそれぞれに設置され且つそれぞれ独自に駆動操舵される前側駆動操舵装置20および後側駆動操舵装置30とを備える。自動走行のうち、前進走行から横走行に切り替わる間の前側駆動操舵装置20および後側駆動操舵装置30は、前進走行から横走行に切り替えつつ、車体11を転回させるように旋回走行させるものとなっている。
(もっと読む)
結線状況提示
【課題】電装品間の結線状況を簡素な結線図として提供する。
【解決手段】表示対象として通信系統が指定されると、この通信系統を含むシステム全体の回路図の提示に代え、この通信系統に含まれる電装品と配線のみで描画された結線図を作成する。この際、通信系統に対応するパーツと配線を描画するためのデータを読み込み、結線図イメージを作成する。この結線図イメージにおいて、配線間の配線間余白領域HJ1〜HJ3や配線側方の配線側方余白領域HSJ1〜HSJ2とを規定し、これら余白領域を削除して除外するようなデータ加工を行って、通信系統に対応するパーツと配線を描画した結線図を作成・表示する。
(もっと読む)
1 - 8 / 8
[ Back to top ]