
株式会社アラキ製作所により出願された特許
1 - 8 / 8
電動台車
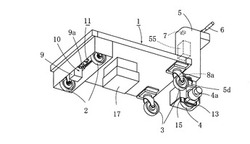
【課題】積載荷重による走行性能の変動が少なく、転回・斜行・横行の機能を備え舵取りも容易で未熟練者であっても容易に操作することができるパワーアシスト付きの電動台車を提供する。
【解決手段】台車底部の四隅に前輪2と後輪3とを配設し、操作部6を備えた運転制御部5を設け、該運転制御部5により旋回方向及び駆動力を制御される電動駆動輪4を配設した電動台車であって、運転制御部5は電動駆動輪4をパワーアシストするパワーアシスト制御部55と、操作部6に加えられる前後進の操作力を検出するセンサ7と、操作部6による電動駆動輪4の旋回角度を検出する角度センサ8とを備え、前輪2にはこの角度センサ8から出力された信号により前輪2を操舵する操舵機構部10を設け、電動駆動輪4に対し前輪2の同位相及び逆位相への操舵と、前輪2の中立固定の機能を備える。
(もっと読む)
パワーアシスト装置、自動搭載装置、およびそれらの制御方法

【課題】パワーアシスト装置および自動搭載装置によってワークを搬送している途中に、パワーアシスト装置等が停止してその後再起動する際にワークや組み付け対象物が破損することを防止するために、パワーアシスト装置等によってワークを搬送している途中に、パワーアシスト装置等が停止してその後再起動しても、ワークが組み付け対象物等と接触することがないパワーアシスト装置、自動搭載装置、およびそれらの制御方法を提供する。
【解決手段】ウィンドウ19とボディ20が接近状態にあると判定される場合には、状態信号が、運転状態から停止状態に移行した時点から、パワーアシスト装置用制御装置8によって、ボディ20に対するウィンドウ19の組み付けが完了した旨の判定処理が成される時点までは、パワーアシスト装置用制御装置8によって、パワーアシスト装置2からコンベア15に対して、停止要求信号を継続して発信する。
(もっと読む)
ウィンドウガラスの取付装置及び取付方法
【課題】ウィンドウガラス取付手段をボディに同期して移動させつつ、ウィンドウガラスをボディの窓枠に取り付けるべく、制御することができる構成の自動車のウィンドウガラスの取付装置を提供する。
【解決手段】ボディを搬送する搬送手段3と、ウィンドウガラス16をボディ2に取り付けるアーム12を有するウィンドウガラス取付手段4と、ウィンドウガラス取付手段4の移動手段5と、移動手段5に設けられたセンサ6と、ボディの窓枠2bの段差部Bを、センサによって検出させ、その検出信号に基づいて、移動手段5によってウィンドウガラス取付手段4を搬送手段3と同期するように移動させ、センサ6によって、ウィンドウガラス16の端部を検出させ、ウィンドウガラス16の端部とボディ2の窓枠2bの段差部Bとが平面上で略一致するようにアーム12を制御する制御手段7と、を備えている。
(もっと読む)
吸着装置
【課題】小型で騒音の小さい吸着装置を提供する。
【解決手段】モータ200と、モータ200に入力端が連結されたクランク機構300と、シリンダ400と、吸気室505に通じる吸気路504が形成されており、吸気路504の端部に、吸気室505内の負圧が作用すると開放され、正圧が作用すると閉鎖される吸気用チェック弁502を有するシリンダヘッド500と、クランク機構300の出力端に連結されてシリンダ400内を上下動するピストン603によってシリンダヘッド500の吸気室505内の圧力を変化させる構成とされており、ピストン603に形成された排気路613の端部に、吸気室505内の負圧が作用すると閉鎖され、正圧が作用すると開放される排気用チェック弁602を有するダイヤフラムポンプ600と、シリンダヘッド500に設けられたバキュームパット700と、を備えている。
(もっと読む)
ワークの形状認識システムおよびそれを具備する組立ライン、並びにワークの形状認識方法
【課題】搬送途中のワークの表面に現れる形状変化を精度良く認識し、組立ライン内に設けられる組付装置と、ワークとの間の位置ズレを防止することが可能な技術を提供することを課題とする。
【解決手段】車体3の搬送経路8に沿って設けられ、車体3の基準位置Zを検出するリミットスイッチ30と、同じく車体3の搬送経路8に沿って設けられ、車体3の基準位置Zからの移動量Lを検出するロータリエンコーダ40と、同じく車体3の搬送経路8に沿って設けられ、車体3の表面(主としてルーフ面3a、並びにその他の表面)との直線距離Hを検出するレーザ変位計50と、ロータリエンコーダ40とレーザ変位計50とにより検出された二つの検出値に基づいて、搬送方向と平行な方向における車体3の表面の形状変化を認識する認識装置60と、を具備する。
(もっと読む)
モータの制御システムおよびモータの制御方法
【課題】モータの過負荷を保護しつつ、モータを停止せずに当該モータを用いた作業を継続することが可能なモータの制御システムおよびモータの制御方法を提供することを課題とする。
【解決手段】コントローラ30は、駆動電流Idriがしきい値Ihighを超えたと判断する間に、駆動電流Idriの時間積分を行い、この時間積分値Asが所定の限界値Ashighを超えた場合に、モータ10は過負荷状態であると判断し、サーボアンプ20からモータ10に供給する電流値Iの最大電流Imaxを所定の制限値Ilim以下に制限することによりモータ10の過負荷状態を回避する。
(もっと読む)
パワーアシスト装置及びその制御方法
【課題】急停止・急発進に伴うワークの揺れによってワークと相手ワークとが接触することを防止できるパワーアシスト装置及びその制御方法を提供する。
【解決手段】操作ハンドル6と、力センサ7と、ウィンドウ2を保持するロボットアーム3と、ロボットアーム3を駆動するアクチュエータ11と、ロボットアーム3を搬送する搬送手段14と、を備え、搬送手段14を組立ライン上を移動しているボディ100と同期して移動させて、ウィンドウ2をボディ100に組付けるパワーアシスト装置50の制御方法であって、ボディ100の動作状態が、移動状態を継続している通常時には、搬送手段14がボディと同期して移動するように制御し、ボディ100の動作状態が、移動状態から停止状態もしくは停止状態から移動状態へと変化した場合には、ロボットアーム3の駆動を、所定時間の間停止させ、所定時間が経過後、ロボットアーム3の駆動を再開する。
(もっと読む)
ワーク移送用バランサ装置
【課題】高精度にワークを静止させることができるワーク移送用バランサ装置を提供する。
【解決手段】平衡アーム部材4と回動アーム部材5とが連結する回動連結部8に、回動アーム部材5の回動に従って複動シリンダ装置17の内圧を変更するエアー調圧器20を配設した。このエアー調圧器20は、所定圧の一次圧が印加される一次圧用ポート61と、回動アーム部材5の回動角度αの変化に対応して増減される二次圧を出力する二次圧用ポート62とを具備し、さらに該二次圧用ポート62は複動シリンダ装置17のヘッド側室19に連通されて二次圧が複動シリンダ装置17内に印加されるようにした。そして、回動アーム部材5が回動してワーク側のモーメントが変化すると、二次圧が調圧されて複動シリンダ装置17のピストンロッド18が進退制御され、左右のモーメントが一致する構成とした。
(もっと読む)
1 - 8 / 8
[ Back to top ]