
ジエービス・ビー・ウエブ・インターナショナル・カンパニーにより出願された特許
1 - 7 / 7
積荷を搬送体に自動的に積込むシステム及び方法
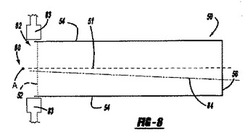
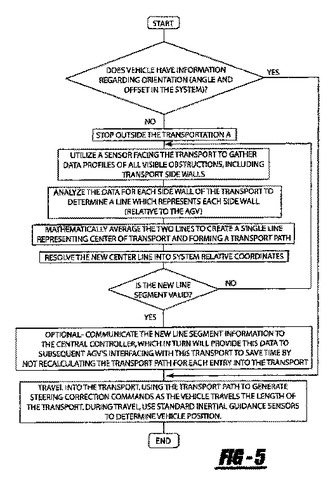
搬送体に対して積込み及び積下ろしを自動で行うための方法及びシステムを開示する。誘導システムは、走行パスを搬送体の近傍の位置までたどり、その後、センサによる搬送体のプロファイルにより、自動案内車両用が積荷を下ろすために搬送体の中へ向かってたどり、積荷を下ろすと搬送体を出るためにたどる搬送体パスが確定される。 (もっと読む)
積荷を搬送体に自動的に積込むシステム及び方法

搬送体に対して積込み及び積下ろしを自動で行うための方法及びシステムを開示する。誘導システムは、走行パスを搬送体の近傍の位置までたどり、その後、センサによる搬送体のプロファイルにより、自動案内車両用が積荷を下ろすために搬送体の中へ向かってたどり、積荷を下ろすと搬送体を出るためにたどる搬送体パスが確定される。 (もっと読む)
リフト車両用フローティングフォーク
搬送体に対して積込み及び積下ろしするための自動案内車両等の物品処理車両において、該車両には自由に浮くことが可能な1対のフォークが含まれる。このフォーク対は、垂直方向に自由に移動できるとともに、フォーク・キャリッジに対して軸を中心に枢動又は傾斜することができるが、積荷が載せられると、フォーク対がロックされるため、自由に浮く動きが阻止される。
(もっと読む)
搬送体の自動積荷システム及び積荷方法
搬送体の自動的な積荷及び除荷のための方法及びシステムが開示される。第1の案内システムは、搬送体近傍の位置へ向かう走行路に従い、次いでセンサが搬送体を検出してデータを作成する。それによって、搬送路が決定され、自動案内車両が該搬送路に沿って搬送体へと移動して物品を引渡す。又、物品の引渡し、ならびに配置の後に、該自動案内車両は搬送体から出る。
 (もっと読む)
(もっと読む)
自動案内車両の接地装置
自動案内車両を電気的に接地することに関連して用いられる装置及び方法である。接地ストラップが自動案内車両から懸垂され、該接地ストラップが該自動案内車両の走行通路に沿って床に設置された導電性の接地部材と接触するように構成される。動作において、該接地ストラップは導電性部材と接触し、これによって該自動案内車両と関連して使用される電子機器を電気的に接地する。 (もっと読む)
積荷を搬送体に自動的に積込むシステム及び方法
本発明は、搬送体に対して積荷の自動積込み及び積下ろしを遂行する方法及びシステムに関する。この搬送体に近接する位置までの走行のために第1の誘導システムが用いられ、搬送体への走行のために第2の誘導システムが用いられる。 (もっと読む)
コンベアシステム上の積荷を追跡する方法及びコンベア装置
積荷の後縁を用いてコンベア装置上の積荷の追跡を行なう方法及び装置に関する。当該方法は、第1のセンサで積荷の後縁を検出するステップと、該第1のセンサによる積荷の後縁の検出に応答して積荷の積荷記録を更新するステップとを有する。当該装置は、コンベアと、コントローラと、該コントローラと通信接続されコンベア上の積荷の後縁の検出を行なうセンサとを備える。 (もっと読む)
1 - 7 / 7
[ Back to top ]