
ミツビシ・エレクトリック・リサーチ・ラボラトリーズ・インコーポレイテッドにより出願された特許
41 - 50 / 484
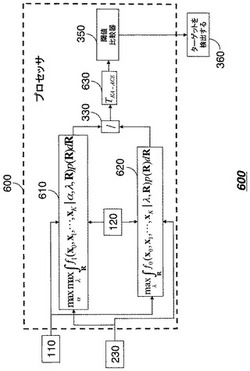
時空間適応処理を用いてレーダー信号におけるターゲットを検出する方法
【課題】方法は、時空間適応処理を用いてレーダー信号におけるターゲットを検出する。
【解決手段】検定統計量は、
【数1】
である。ここでx0はテスト信号であり、xkはK個のトレーニング信号であり、αはテスト信号内のターゲット信号の未知の振幅であり、λはスケール係数であり、Rはトレーニング信号の共分散行列であり、関数maxは最大値を返す。検定統計量は、閾値と比較され、ターゲットが存在するか否かが判断される。
(もっと読む)
宇宙船の姿勢維持方法、制御モジュールおよび変位補正力の決定方法

【課題】この発明の実施の形態は、少なくとも1つの変位方向に対して変位した姿勢への宇宙船の変位に応じて宇宙船の編隊を維持する方法を開示する。
【解決手段】この発明の実施の形態は、少なくとも1つの変位方向に対して変位した姿勢への宇宙船の変位に応じて宇宙船の編隊を維持する方法を開示する。ここで、宇宙船は、補正力を発生するコマンドを生成することにより、補正力を発生するように、構成される。補正力は、宇宙船を変位方向に対して変位した姿勢に維持するように構成された基本力と、変位した姿勢での宇宙船の変位方向に対する編隊維持を最適化するように構成された余裕力との和の関数として決定される。
(もっと読む)
無線ネットワークのリソースブロックにおいて暗黙的に埋め込まれたパイロットシンボルを有するデータシンボルを符号化する方法
【課題】MIMO技法及びOFDM技法に基づくネットワークのリソースブロックを符号化する方法を提供する。
【解決手段】データシンボルのセット210が変調コンステレーションのセットから選択され、データシンボルのセットのサンプル平均が求められる。各データシンボルは、まず、サンプル平均だけシフトされて、シフトされたデータシンボルが取得され、次いで、シフトされたシンボルに第1の定数が乗算されて、スケーリングされたデータシンボルが取得される。第2の定数が、スケーリングされたデータシンボルに加算されて、マッピングされたデータシンボルが取得される。サンプル平均に第3の定数が乗算されて、サンプル平均のマッピングされたシンボル230が取得される。マッピングされたデータシンボルのセット及びサンプル平均のマッピングされたシンボルは、その後、リソースブロック240として送信される。
(もっと読む)
マルチビュービデオをエンコードする方法
【課題】ビュー間の時間的相関及び空間的相関の両方を用いるマルチビュービデオをエンコードする方法を提供する。
【解決手段】マルチビュービデオは経時的な複数のビューのフレームを含むものであって、方法は、前記マルチビュービデオの特定のビューにおける現在の画像を予測するステップと、前記予測された画像に基づいて前記特定のビューに関連する予測依存性メッセージを生成するステップと、前記予測依存性メッセージは、前記特定のビューについて参照として用いられるビューの数と、どのビューが前記特定のビューについて参照として用いられるかを示すビューインデックスの集合を示すものであって、前記予測された画像と前記予測依存性メッセージとを符号化するステップとを含む。
(もっと読む)
マルチビュービデオをデコードする方法
【課題】マルチビュービデオにランダムにアクセスする方法を提供する。
【解決手段】経時的なフレームを含むマルチビュービデオのデコード方法で、マルチビュービデオの現在のフレームに関連する、特定のビューについて参照として用いられるビューの数とどのビューが該特定のビューについて参照として用いられるかを示すビューインデックスの集合を示す、予測依存性メッセージを受け取るステップと、特定の時間とは異なる時間に参照される時間参照ピクチャと同時間で異なるビューから参照される空間参照ピクチャとをインデックス付けする参照ピクチャリストを保持するステップと、保持された参照ピクチャリストと予測依存性メッセージとに基づいてマルチビュービデオの特定のビューにおける現在の画像を予測するステップとを含み、予測するステップは、時間参照ピクチャを用いる時間予測と空間参照ピクチャを用いる空間予測から選択される、方法である。
(もっと読む)
無線ネットワークの送信機においてシンボルを符号化するための方法
【課題】多入力多出力(MIMO)直交周波数分割多重(MIMO−OFDM)を用いる無線ネットワークの送信機において、シンボルの送信に用いられるサブキャリアを、連続したサブキャリアのK個のグループのセットに分割することによりシンボルが符号化される。
【解決手段】NK−1個の変調シンボルDk(1),Dk(2),...,Dk(NK−1)のグループkごとに、グループkの変調シンボルDk(n)が、m(k)=1/(NK−1)ΣNK−1n=1Dk(n),Xk(n)=α1(k)(Dk(n)−m(k))+β(k)(n=1,...,NK−1),Xk(NK)=α2(k)m(k)にしたがって、対応するマッピングされた変調シンボルXk(n)にマッピングされる。m(k)はk番目のグループに対応する変調シンボルのセットのサンプル平均であり、α1(k)、α2(k)、およびβ(k)(k=1,...,K)は定数で、所定の正数である。
(もっと読む)
シーン内のPS(一点)と、反射屈折光学系のCOP(投影中心)との間の光線の少なくとも1つの折り返し点の3D位置を求める方法、およびシステム
【課題】シーン内の一点(PS)と、反射屈折光学系のカメラの投影中心(COP)との間の光線の折り返し点の3次元(3D)位置を求めるシステム及び方法を開示する。
【解決手段】PS及びCOPの3D位置を含む反射屈折光学系を、折り返し光学素子の対称軸とPSとによって定義される2次元(2D)平面上にマッピングして、この2D平面上に円錐並びにPS及びCOPの2D位置を生成し、この円錐、PS及びCOPの2D位置に基づいて2D平面上の折り返し点の2D位置を求める。次に、2D平面上の折り返し点の2D位置から折り返し点の3D位置を求める。
(もっと読む)
マルチビュービデオをデコードする方法
【課題】既知のビュー依存性によりマルチビュービデオにランダムにアクセスする方法を提供する。
【解決手段】現在のフレームに関連する、特定のビューについて参照として用いられるビューの数とどのビューが前記特定のビューについて参照として用いられるかを示すビューインデックスの集合を示す、予測依存性メッセージを受け取るステップと、特定の時間とは異なる時間に参照される時間参照ピクチャと同時間で異なるビューから参照される空間参照ピクチャとをインデックス付けする参照ピクチャリストを保持するステップと、参照ピクチャリストと予測依存性メッセージとに基づいてマルチビュービデオの特定のビューにおける現在の画像を予測するステップを含み、予測するステップは、空間参照ピクチャのみを用いる空間予測を用いるもので、当該空間予測を用いて現在の画像を生成する場合、参照ピクチャリストから時間参照ピクチャを削除するステップを含む。
(もっと読む)
コードワードを復号するための方法
【課題】非コヒーレント符号を用いて符号化され、直交周波数分割多重(OFDM)を用いた多入力多出力(MIMO)ネットワークにおいて非コヒーレントチャネルを介して受信機において受信されたコードワードが、受信機において受信信号の複数の隣接するコードワードを連結してスーパーブロックにすることによって復号する方法を提供する。
【解決手段】コードブックに基づいて射影行列を予め求める。射影行列を用いてスーパーブロック内の各コードワードが対応する送信されたコードワードの直交補空間上に射影され、一般化尤度比検定(GLRT)コードワードの対応する距離メトリックを得る。最小距離メトリックを選択して、送信信号に対応する送信されたコードワードの推定値を得る。
(もっと読む)
環境における3次元(3D)オブジェクトの3D姿勢を求めるための方法
【課題】カメラによって前記環境から捕捉した画像から特徴を抽出することによって、環境における3次元(3D)オブジェクトの3D姿勢が求められる。
【解決手段】前記特徴を前記環境の3Dモデルにマッチングして、対応を求める。前記対応を用いて、前記画像のカメラ基準系および前記環境のワールド基準系を対応する中間カメラ基準系および対応する中間ワールド基準系に変換する。前記中間カメラ基準系および前記中間ワールド基準系に幾何学的制約を適用して、制約付き中間ワールド基準系および制約付きワールド基準系を取得する。次に、前記制約付き中間ワールド基準系および前記制約付きワールド基準系のパラメーターから前記3D姿勢を求める。
(もっと読む)
41 - 50 / 484
[ Back to top ]